
帆の面積と角度を制御し、マストの上部に浮流重油の検出センサーを取り付けた浮遊式ブイの海面漂流特性、浮流重油を昼夜にわたって検出可能なセンサー特性、浮流重油の自動追跡制御性能の試験と評価を、実際の重油を用いた油回収実海域再現水槽や海域試験にて行う。次に、複数のブイロボットを用いて、日本での海面上のターゲットの自動追跡実験を行う。
本研究の手段2
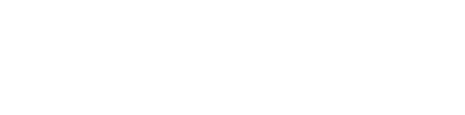
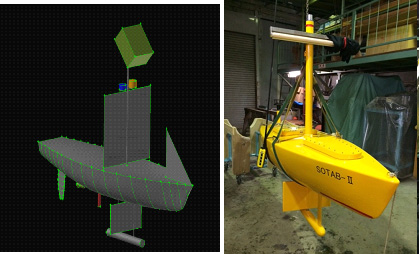
新型SOTAB-II
LOA:2.67m
Bmax:0.76m
Sail:0.75*0.75 m
Brake Board: 0.3*0.5 m
海面を浮流している油は、風速のほぼ3パーセントの速度で流される海面流れと、
潮流の合ベクトル方向に流れていくと考えられている。 SOTAB-IIは、GPS, 風速計、流速計、方位計を用いて、この流れに乗って移動する制御を行う。ブイの速度は帆の大きさで調整し、ブイの向きは舵で調整する。さらに、マストに上部には、油検知センサーを取り付け、ブイの周りの油塊の中に常にいるように制御を行う。
2014年5月15日,大阪大学吹田キャンパス犬飼池での自律航行制御実験の様子(動画 65MB)
movie_file
2015年3月17日SOTAB-II に関するアメリカでの特許 Unmanned drifting substance monitoring buoy, drifting substance monitoring system, and drifting substance monitoring method (公告番号 US8983780 B2)が公開された。
2015年10月9日
大阪大学吹田キャンパス犬飼池にて、最初認識していた疑似油塊から強制的にロボットを離し、再び疑似油塊を見つけ、疑似油塊を追跡する実験に成功
画像・映像集(Google アルバム)
海上で浮流する重油を発見するための従来の手法
・油の発光現象を利用した監視システム(蛍光ライダー)
油の発光現象を利用した監視システム。
ヘリコプターの航続時間等の制限から、長時間の追跡は難しい
・漂流ブイ
重油の位置から離れた場合、追尾する機能は持っていない
・Xバンドレーダ
広範囲に浮流重油を探知することが可能であるが、その大きさにより、ロボットには搭載ができない
・衛星データを用いた浮流重油位置特定
技術的には可能であるが、常時観測はできない