浮力と翼角の制御により、鉛直方向および水平方向への移動が可能な仕様とする。海中の油やガス成分が検出可能なセンサーや海洋環境計測センサーや流速センサーを配置し、またGPS、衛星との情報通信装置を備え、母船との音響通信モデム、音響海中位置検出装置を搭載した垂直円筒型の海中ロボットを開発する。その運動特性の水槽での試験と評価、センサーの試験室での試験と評価、メキシコ湾での油流出事故周辺や日本の新潟沖でのメタンハイドレード分布海域での海中の油やガスの三次元マッピングや重油やガスのプルームの自動追跡制御の試験と評価を行う。
本研究の手段1
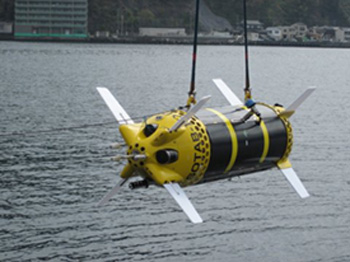
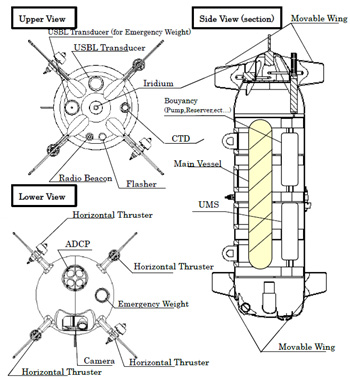
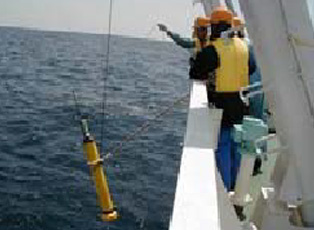
SOTAB-I
Length: 2.626 m
Diameter: 0.657 m
Mass: 320.0 kg
Submergence depth: 2,000m
2013年3月に、浮力調整装置によって水深2,000 mまで上下移動し、同時に、上部に取り付けた2対の可動翼によって横移動も可能とする自律型水中ロボットを開発した。水中ロボットには、海水に溶存する油やガス成分をその場で解析する水中質量分析計、音響流速センサー(ADCP+DVL)、CTDセンサー、音響位置計測装置、音響モデムなどを装備している.

長期間、海底から海面までの三次元空間の環境モニタリングを行う従来の手法
 アルゴ・フロート
アルゴ・フロート
鉛直に立ち浮力調整装置によって、鉛直方向に浮上する。水平方向に能動的に移動する機能がない。
 水中グライダー
水中グライダー
流線型胴体に固定翼が付き、浮力調整装置を使って潜航・浮上により長距離移動する。鉛直方向の移動速度が小さい。