本研究は、深海から噴出する重油やガスのプルームの自動追跡を行う海中ロボット技術や
海面に漂流する重油塊の自動追跡を行う浮遊式ブイロボット技術の確立のために、ロボットの設計・製作、重油などの検出センサーの特性試験、運動シミュレータの開発を行い、性能の評価を行う。
その後、深海から噴出する重油やガスのプルームの自動追跡を行う海中ロボットでは、メキシコ湾での油流出事故周辺海域や新潟沖でのメタンガス発生海域における海洋実験を行う。
浮遊式浮流重油自動追跡ブイロボットでは、複数台を製作し、海上実験を行う。
深海からの油とガスの噴出に関する熱化学的反応を含む拡散シミュレーション技術の確立のために、海底近くのプルームの海洋実験のデータを融合する手法を開発する。浮流重油漂流シミュレーション技術では、大気ー海洋モデルを用い、複数のブイによって得られた重油の漂流位置や海象・気象リアルタイムデータをシミュレーションに融合する手法を開発する。
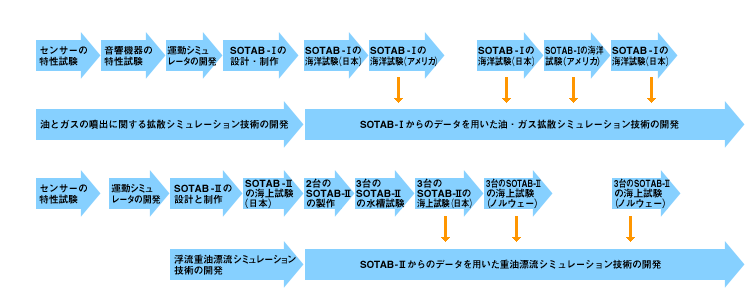
予算申請時の研究スケジュールを下に示す。