Research on Non-linear Phenomena in Ship Motion
Index
In our laboratory, we are conducting a number of studies on nonlinear phenomena.
Fractals in Capsizing of a Ship in Regular Waves
The movement of a ship is non-linear, and strange results can be obtained from really simple equations that you might learn in a second year undergraduate class. The video below shows the result of solving the equation of motion of the ship and determining capsizing and non-capsizing, but a mysterious pattern appears. This is known as fractal.
The banana-like erosion shape shown in this video, to put it a little harder, matches the shape of the stable manifold at the left and right saddle-shaped unstable equilibrium points. The fractals represents complicated phenomenon sunch as bifurcation, chaos, symmetry breaking, etc., but it is interesting to note that the complicated patterns can be generated using a very simple equation of forced ship roll motion as shown below.
A set of sample codes to generate the fractals is provided below,
Python Code
# Visualization of Fractal in Capsizing Equation
#
# Coded by Atsuo MAKI, Ryohei SAWADA and Kouki WAKITA (JFY-R3/4/25)
# Ship Intelligentization Subarea, Osaka University
#
# The equation and parameter set are based on the paper of Dr.Kan as follows
# Kan, M. and Taguchi, H., Capsizing of a Ship in Quatering Seas,
# Journal of the Society of Naval Architects of Japan, vol.168, pp.211-220, 1990
# https://doi.org/10.2534/jjasnaoe1968.1990.168_211
#
import math
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import odeint, solve_ivp
class Config:
"""Config
NDIV: number of time discretization
OMEGA: frequency of external wave moment
KAPPA: damping coefficient
B: Amplitude of external moment
PDIV: In order to show time history, set conf.pdiv = 1.
If not, set 2 or over. Use large value such as conf.pdiv = 100.
ROLL_MAX: absolute value of maximum value of roll angle in search domain
RATE_MAX: absolute value of maximum value of roll angular rate in search domain
T: natural roll period
DT: dicritized time in numerical simulation defined as T / NDIV
MAXT: final time in numerical simulation
"""
NDIV = 100
OMEGA = 0.905
KAPPA = 0.04455
B = 0.12
PDIV = 100
ROLL_MAX = 1.5
RATE_MAX = 1.5
BY_SCIPY = True
FIG_DIR = "./figure.png"
def __init__(self):
self.T = 2.0 * math.pi / self.OMEGA
self.DT = self.T / self.NDIV
self.MAXT = 100 * self.T
def set_config():
return Config()
def right_cal(t, y, conf):
"""Definition of right side of the differential equation
Args:
t (numpy.float64): time (s)
y (numpy.ndarray): y[0]:roll angle, y[1]:roll angler rate
conf (Config): parameter
Returns:
right: right hand side of state equation
"""
right = np.array([
y[1],
- conf.KAPPA * y[1] - y[0] + y[0]**3 +
conf.B * math.cos(conf.OMEGA * t)
])
return right
class RollCapsizing:
"""Class contains functions to be used
"""
def __init__(self, conf):
self.conf = conf
@staticmethod
def get_capsize_detection():
"""Capsizing detection used in solve_ivp func.
"""
def capsize_detection(t, x):
return abs(x[0]) - math.pi
capsize_detection.terminal = True
capsize_detection.direction = 0
return capsize_detection
def calc_time_history(self):
"""Calculate time history of roll motion
Returns:
sol.t: time
sol.y[0]: roll angle
sol.t_events[0]: time to capsize
"""
sol = solve_ivp(
lambda t, y: right_cal(t, y, self.conf),
t_span=(0, self.conf.MAXT),
y0=np.array([-self.conf.RATE_MAX, -self.conf.ROLL_MAX]),
method='RK45',
max_step=self.conf.DT,
# min_step=self.conf.DT,
events=self.get_capsize_detection())
return sol.t, sol.y[0], sol.t_events[0]
def judge_cap_in_grid(self):
"""Numerical calculation and judge capsizing for each parameter
Returns:
cap_roll: initial roll angle which leads to capsizing
cap_rate: initial roll angular rate which leads to capsizing
"""
cap_roll = []
cap_rate = []
int_rate_list = np.linspace(
-self.conf.RATE_MAX, self.conf.RATE_MAX, self.conf.PDIV+1)
int_roll_list = np.linspace(
-self.conf.ROLL_MAX, self.conf.ROLL_MAX, self.conf.PDIV+1)
for i_rate, int_rate in enumerate(int_roll_list):
for i_roll, int_roll in enumerate(int_roll_list):
if self.conf.BY_SCIPY:
cap_occur = self.judge_cap_by_scipy(
int_rate, int_roll)
else:
cap_occur = self.judge_cap_by_myrk4(
int_rate, int_roll)
print(f"rate {i_rate} / {self.conf.PDIV}: roll: {i_roll} / {self.conf.PDIV}", end='\r')
if cap_occur == False:
cap_roll.append(int_roll)
cap_rate.append(int_rate)
return cap_roll, cap_rate
def judge_cap_by_scipy(self, int_rate, int_roll):
"""numerical calculation and judge capsizing (this function uses solve_ivp in scipy)
Args:
int_rate (numpy.float64): initial roll angular rate
int_roll (numpy.float64): initial roll angle
Returns:
bool: True = capsizing, False = not-capsizing
"""
sol = solve_ivp(
lambda t, y: right_cal(t, y, self.conf),
t_span=(0, self.conf.MAXT),
y0=np.array([int_roll, int_rate]),
method='RK45',
t_eval=(0, self.conf.MAXT),
events=self.get_capsize_detection()
)
return len(sol.t_events[0]) != 0
def judge_cap_by_myrk4(self, int_rate, int_roll):
"""numerical calculation and judge capsizing (this function uses my 4th order Runge-Kutta)
Args:
int_rate (numpy.float64): initial roll angular rate
int_roll (numpy.float64): initial roll angle
Returns:
bool: True = capsizing, False = not-capsizing
"""
def f(t, y): return right_cal(t, y, self.conf)
y = np.array([int_roll, int_rate])
t_series = np.arange(
0, self.conf.maxT + self.conf.DT, self.conf.DT
)
cap_d = self.get_capsize_detection()
for t in t_series:
k_1 = f(t, y)
k_2 = f(t + self.conf.DT / 2.0, y + self.conf.DT * k_1 / 2.0)
k_3 = f(t + self.conf.DT / 2.0, y + self.conf.DT * k_2 / 2.0)
k_4 = f(t + self.conf.DT, y + self.conf.DT * k_3)
y += self.conf.DT * (k_1 + 2 * k_2 + 2 * k_3 + k_4) / 6
if cap_d(t, y) > 0:
return True
return False
def calc_roll_cap(conf):
rc = RollCapsizing(conf)
return rc.judge_cap_in_grid()
def calc_roll_history(conf):
rc = RollCapsizing(conf)
return rc.calc_time_history()
def draw_figure(cap_roll, cap_rate, conf):
"""Draw fractal plot in case of conf.PDIV > 1
Args:
cap_roll (list): initial roll angle which leads to capsizing
cap_rate (list): roll angular rate which leads to capsizing
conf (Config): config
"""
# font
plt.rcParams['font.size'] = 12
plt.rcParams['font.family'] = 'Times New Roman'
# make tick direction inside
plt.rcParams['xtick.direction'] = 'in'
plt.rcParams['ytick.direction'] = 'in'
# set color
gainsboro = [220 / 255, 220 / 255, 220 / 255]
# set axis
fig = plt.figure(figsize=(8.0, 8.0), facecolor='w')
ax = fig.add_subplot(1, 1, 1)
ax.set_xlim([-1.5, 1.5])
ax.set_ylim([-1.5, 1.5])
# x-y axis
ax.yaxis.set_ticks_position('both')
ax.xaxis.set_ticks_position('both')
# set labels
fig.suptitle(
'White region is the initial condition which leads to capsizing.')
ax.set_xlabel('roll [ rad ]')
ax.set_ylabel('roll rate [ rad / sec ]')
# Text box
str_annotation = ' B = ' + str(conf.B)
text_dict = dict(boxstyle="round4",
facecolor=gainsboro, edgecolor="black")
# show annotation (box style)
ax.annotate(
str_annotation,
xy=(-1.25, 1.25),
bbox=text_dict,
size=15, color="black")
# plot
ax.scatter(cap_roll, cap_rate, s=5, c='black', edgecolors=None)
# save
fig.savefig(conf.FIG_DIR)
def draw_time_series(t, y, t_cap_occur, conf):
"""Draw time series in the case of conf.PDIV == 1
Args:
t (numpy.ndarray): time
y (numpy.ndarray): soltuion of differential equation in time domain
t_cap_occur (numpy.ndarray): time to capsize
conf (Condig): config
"""
# font
plt.rcParams['font.size'] = 12
plt.rcParams['font.family'] = 'Times New Roman'
# make tick direction inside
plt.rcParams['xtick.direction'] = 'in'
plt.rcParams['ytick.direction'] = 'in'
plt.rcParams['mathtext.fontset'] = 'stix'
# set color
crimson = [220 / 255, 20 / 255, 60 / 255]
# set axis
fig = plt.figure(figsize=(8.0, 8.0/1.67), facecolor='w')
ax = fig.add_subplot(1, 1, 1)
if len(t_cap_occur) == 0:
ax.set_xlim([0, conf.maxT])
else:
ax.set_xlim([0, t_cap_occur])
ax.set_ylim([-math.pi, math.pi])
# x-y axis
ax.yaxis.set_ticks_position('both')
ax.xaxis.set_ticks_position('both')
# set title and label
if len(t_cap_occur) == 0:
str_title = 'time series (not capsizing)'
else:
str_title = 'time series (capsizing)'
fig.suptitle(str_title)
ax.set_xlabel('time [ s ]')
ax.set_ylabel('roll [ rad ]')
# plot
ax.plot(t, y, color=crimson)
# save
fig.savefig(conf.FIG_DIR)
def main():
conf = set_config()
is_run_profiling = False
if is_run_profiling:
try:
from line_profiler import LineProfiler
print("Running profiling: calc_roll_cap \n")
prof = LineProfiler()
prof.add_function(calc_roll_cap(conf))
prof.runcall(calc_roll_cap(conf))
prof.print_stats()
except ImportError:
print('ImportError: line_profiler is not installed. If you want to profile the code, use pip and install it.')
pass
else:
if conf.PDIV == 1:
t, y, t_cap_occur = calc_roll_history(conf)
draw_time_series(t, y, t_cap_occur, conf)
else:
cap_roll, cap_rate = calc_roll_cap(conf)
draw_figure(cap_roll, cap_rate, conf)
# Main program goes here
if __name__ == "__main__":
main()
Julia Code
#
# Fractal in Capsizing Equation
# Coded by Ryohei SAWADA, Atsuo MAKI and Kouki WAKITA (JFY-R3/4/24)
# The equation and parameter set are based on the paper of Dr.Kan as follows
# Kan, M. and Taguchi, H., Capsizing of a Ship in Quatering Seas,
# Journal of the Society of Naval Architects of Japan, vol.168, pp.211-220, 1990
# https://doi.org/10.2534/jjasnaoe1968.1990.168_211
#
using PyPlot
# Calculation config.
Base.@kwdef struct Config
ndiv::Int = 100
ω::Float64 = 0.905 # frequency of external wave moment
κ::Float64 = 0.04455 # damping coefficient
t::Float64 = 2π / ω # natural roll period
dt::Float64 = t / ndiv # time step of integration
maxn::Int = 100 * ndiv
b::Float64 = 0.12
# In order to show time history, set config.pdiv = 1.
# If not, set 2 or over. Use a large value such as config.pdiv = 100.
pdiv::Int = 100
roll_max::Float64 = 1.5
rate_max::Float64 = 1.5
droll::Float64 = roll_max * 2.0 / pdiv
drate::Float64 = rate_max * 2.0 / pdiv
end
"""
equation(t, y, config::Config)
Roll motion for capsizing simulation.
The first argument `t` is a time to calculate external force by wave.
The second argument `y` is a vector of the roll angle and the rate of rolling.
The configration of equation is given as a `Config` struct.
"""
function equation(t, y, config::Config)
return [y[2], - config.κ * y[2] - y[1] + y[1]^3 + config.b * cos(config.ω * t)]
end
"""
calc_roll_capsize(config::Config=Config())
Capsizing simulation.
Integration is done by RK4.
"""
function calc_roll_capsize(config::Config=Config())
# Initialization
iscap = zeros(Bool, config.pdiv, config.pdiv) # flg mat. for capsizing or not.
cap_roll = Float64[] # capsizing simulation result of roll
cap_rate = Float64[] # capsizing simulation result of rolling rate
for i_rate in 1:config.pdiv
ini_rate = - config.rate_max + i_rate * config.drate
for i_roll in 1:config.pdiv
flush(stdout)
print(" rate: $(lpad(string(i_rate), 3, "0")) / $(config.pdiv) roll: $(lpad(string(i_roll), 3, "0")) / $(config.pdiv) \r")
t = 0.0
ini_roll = - config.roll_max + i_roll * config.droll
y0 = [ini_roll, ini_rate]
y = y0[:] # deepcopy
iscap[i_roll, i_rate] = false
# Integration with Runge-Kutta
for i in 1:config.maxn
k_1 = equation(t, y, config)
k_2 = equation(t + config.dt / 2.0, y + config.dt * k_1 / 2.0, config)
k_3 = equation(t + config.dt / 2.0, y + config.dt * k_2 / 2.0, config)
k_4 = equation(t + config.dt, y + config.dt * k_3, config)
y += config.dt * (k_1 + 2.0 * k_2 + 2.0 * k_3 + k_4) / 6.0
t += config.dt
if abs(y[1]) > π # if capsizing
iscap[i_roll, i_rate] = true
break
end
end
if iscap[i_roll, i_rate] == false
append!(cap_roll, [y0[1]])
append!(cap_rate, [y0[2]])
end
end
end
return cap_roll, cap_rate, config
end
"""
draw_figure(cap_roll, cap_rate, config::Config=Config())
Draw figure from a simulation result by `calc_roll_capsize()`.
"""
function draw_figure(cap_roll, cap_rate, config::Config=Config())
# set color
gainsboro = [220 / 255, 220 / 255, 220 / 255]
# set axis
fig = PyPlot.figure(figsize=(8.0, 8.0), facecolor="w")
PyPlot.xlim(- 1.5, 1.5)
PyPlot.ylim(- 1.5, 1.5)
PyPlot.PyDict(PyPlot.matplotlib."rcParams")["font.size"] = 12
PyPlot.PyDict(PyPlot.matplotlib."rcParams")["font.family"] = "Times New Roman"
# make tick direction inside
PyPlot.PyDict(PyPlot.matplotlib."rcParams")["xtick.direction"] = "in"
PyPlot.PyDict(PyPlot.matplotlib."rcParams")["ytick.direction"] = "in"
# x-y axis
PyPlot.gca().xaxis.set_ticks_position("both")
PyPlot.gca().yaxis.set_ticks_position("both")
# set labels
fig.suptitle(
"White region is the initial condition which leads to capsizing.")
PyPlot.xlabel("roll [ rad ]")
PyPlot.ylabel("roll rate [ rad / sec ]")
# Text box
str_annotation = " B = $(config.b)"
text_dict = Dict("boxstyle" => "round4", "facecolor" => gainsboro, "edgecolor" => "black")
# show annotation (box style)
PyPlot.gca().annotate(str_annotation,
xy=(-1.25, 1.25),
bbox=text_dict,
size=15, color="black")
# plot
PyPlot.scatter(cap_roll, cap_rate, s=5, c="black", edgecolors="None")
# draw now
PyPlot.show()
end
function main()
cap_roll, cap_rate, config = @time calc_roll_capsize()
draw_figure(cap_roll, cap_rate)
end
if abspath(PROGRAM_FILE) == @__FILE__
main()
end
The moment when a banana-like shape begins to appear can be estimated by a theoretical calculation method devised by a researcher named Melnikov as shown below.
When, \(\kappa=0.04455\) and \(\omega=0.905\), \(B\,(=B_{M})=0.0383\). In the above video there is a counter of \(B\), if you stop the video near this value, you can see that it is close to the condition where the banana shape starts to appear. The theory is quite interesting.
For example, the Saddle-Node bifurcation, which was one periodic solution for a small wave, is divided into three periodic solutions as the wave increases, and then the stable solution and the unstable solution annihilate, which can be easily observed from this equation.
Capsizing in Irregular Waves
But the actual waves are irregular. Then, can we use the approach and way of thinking about regular waves? The answer is yes. Recent research has made it possible to predict the probabilistic behavior of ship movements.What we use here is a stochastic process, especially a stochastic differential equation, which you may not learn in the undergraduate school. The one-dimensional stochastic differential equation for a certain quantity \(\mathcal{H}\) in the motion of a ship is given by,
The above equation is called Ito's stochastic differential equation. The steady-state FPK (Fokker-Planck-Kolmogorov) equation that corresponds to this equation is shown below.
\(\mathcal{P}(\mathcal{H})\) represents the probability density function which can be found from the equation below using the constant \(C\),
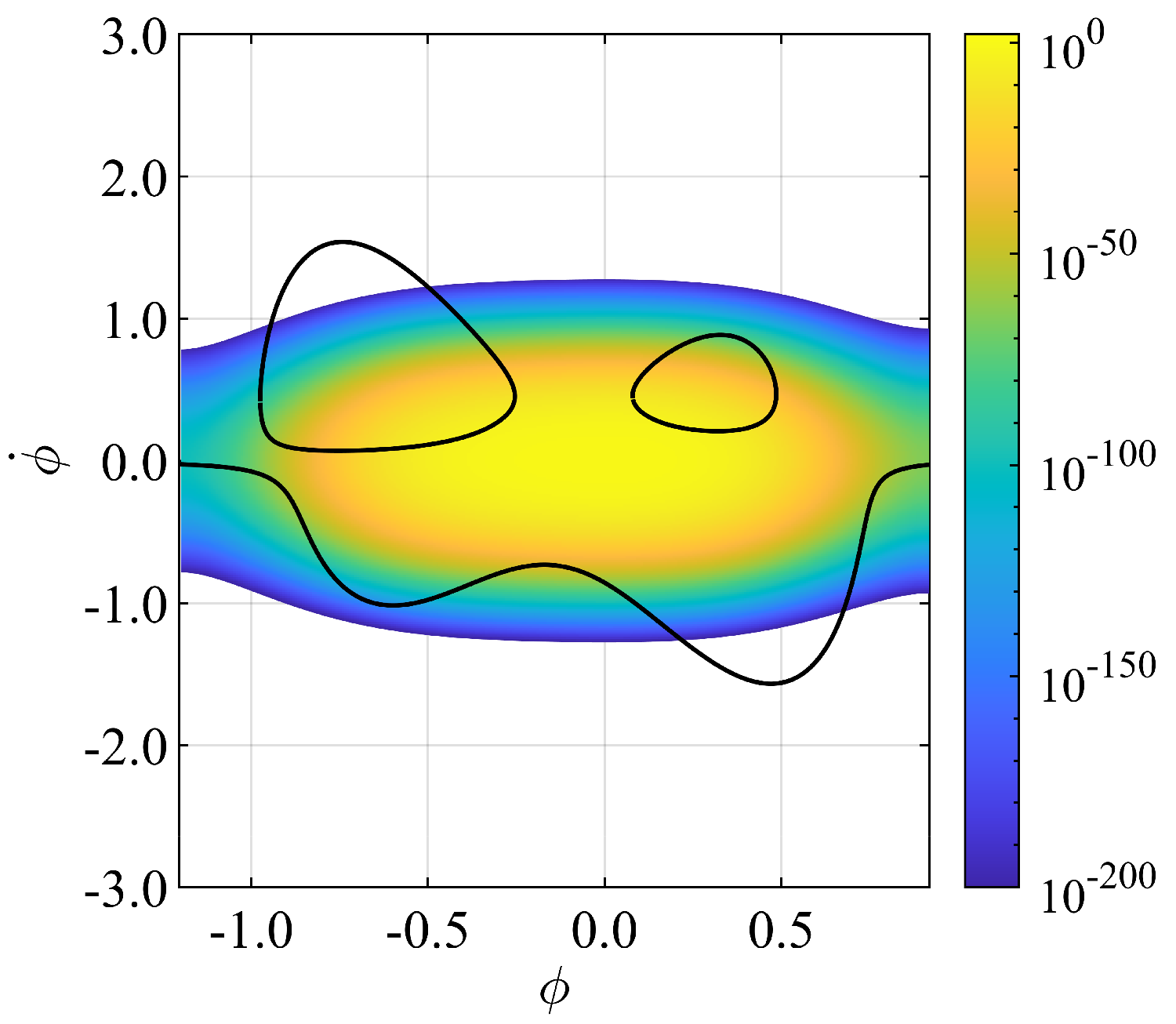
The probability density function of the ship's motion obtained by solving the problem in the irregular wave is shown below. The left is a numerical calculation and the right is a theoretical calculation. It's a good match. Don't you think the theory is amazing?
Such an approach allows the probabilistic calculation of ship capsizing. Furthermore, by applying this result, we are thinking about acceleration and its jerk of differential value using a new calculation method called PLIM (PDF Line Integral Method). The figure below shows the integration path of the line integral used at that time. It has a strange shape.