We have carried out research and development of Spilled Oil Tracking Autonomous Buoy System (SOTAB) and spilled oil drifting simulation using an external research fund and through a research collaboration.
The objectives of this study are as follows:
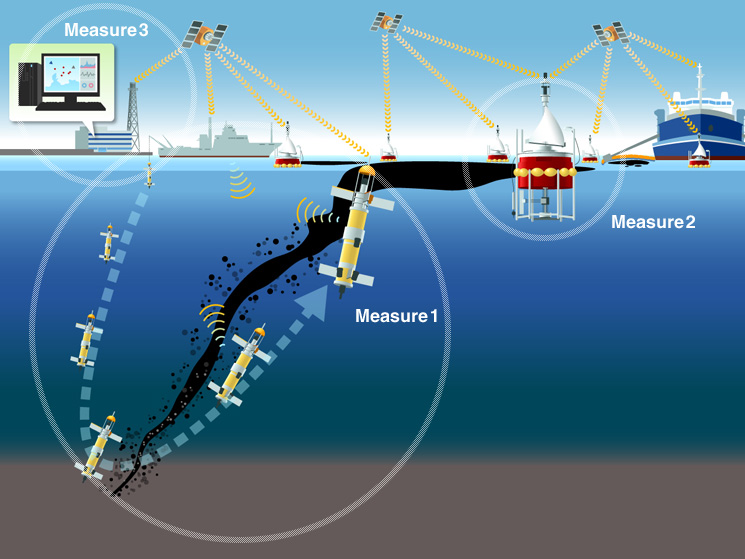
(1) Autonomous tracking and monitoring of spilled plumes of oil and gas from seabed by an underwater buoy robot,
(2) Autonomous tracking of spilled oil on sea surface and transmission of useful data to a land station through satellites in real time by multiple floating buoy robots,
(3) Improvement of the accuracy of simulation for predicting unsteady behavior of spilled oil and gas by incorporating the real time data from these robots.