
Multiple floating buoy robots equipped with sails of which direction and size are both adjustable and detecting sensor of oil slick on sea surface will be developed. They will be tested in Japan using artificial targets on sea surface, and in Norway using real oil on sea surface.
Measure 2
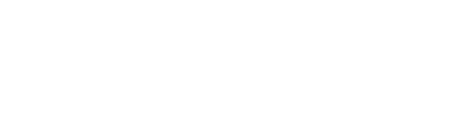
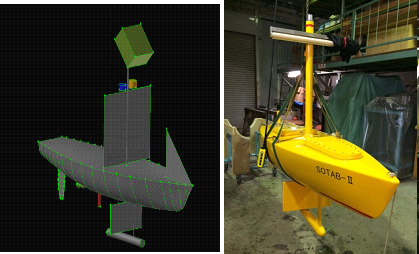
新型SOTAB-II
LOA:2.67m
Bmax:0.76m
Sail:0.75*0.75 m
Brake Board: 0.3*0.5 m
In presence of wind and current, the drifting velocity vector of an oil spill is the resultant velocity vector of 2-5.0 % of the wind velocity vector along the wind direction at a 10 m height from the sea surface and the water current velocity vector. SOTAB-II control the speed and the azimuth so as to track the oil slick using GPS, anemometer, velocimeter, attitude sensor. The spped is controlled by adjusting the area of the sail, and the azimuth is controlled by adujusting the rudder. In addition, an oil slick fluorescence sensoor is attached on the mast to control the position of the vehicle inside of oil slick.
Movie of autonomous navigation of SOTAB-II at Inugai-Ike pond in Suita Campus of Osaka University on May 15, 2014 (65MB)
movie_file
US Patent on SOTAB-II(US8983780 B2) was disclosed with the tilte of Unmanned drifting substance monitoring buoy, drifting substance monitoring system, and drifting substance monitoring method on March 17th, 2015.
SOTAB-II was successful to autonomously track arificial oil slicks after it was pulled intentionally from arificial oil slicks at the initial time at Inugai-Ike pond on October, 9th, 2015. movie(Google albumn)
Existing method for detection of oil slick on the free surface
Fluorescence Lidar:
Imaging system detecting excited fluorescence of substances using CCD camera
This system mounted on a helicopter or a small airplane can provide the spreading image of spilled oil and classification of oils.
However, Seach time is limited.
Observation Buoy:
It is deployed on the sea and continuously detects the spilled oil.
It cannot track the spilled oil, if the spilled oil drifts apart from the buoy.
Remote Sensing:
Sensors mounted on a space satellite can provide the spreading image of spilled oil and classification of oils.
This system sends the data only several times in a day.
X-band Radar:
Sensors mounted on a ship can provide the spreading image of the spilled oil.
This system cannot be used for buoy.