An underwater buoy robot equipped with a buoyancy control device and two pairs of rotational fins for guidance and control, and detecting sensors of dissolved gas and oil will be developed. It will be tested finally in the areas of Gulf of Mexico and off Niigata where methane gas is spilled.
Measure 1
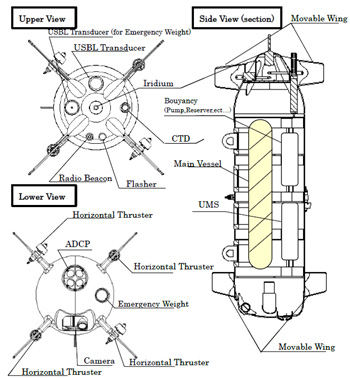
SOTAB-I
Length: 2.626 m
Diameter: 0.657 m
Mass: 320.0 kg
Submergence depth: 2,000m
We made an underwater robot movable not only in the vertical direction from sea surface to water depth of 2,000m by a buoyancy control device, but also in the horizontal direction by two pairs of rotational fins.
The underwater robot installs an underwater mass spectrometer for detecting dissolved gas and oil, other marine environmental sensors,an acoustic velocimeter with altitude sensor, an acoustic navigation system with an acoustic modem.

Movie of autonomous control of SOTAB-I off Tokushima on July 24th, 2014(64MB)
movie_file
Existing methods for marine environmental monitoring in 3-D space from sea surface to deep water over the long term
 Argo Float
Argo Float
It floats vertically and repeats descending and ascending in the vertical direction. However, it does not have a function of active movement in the horizontal direction.
 Underwater Glider
Underwater Glider
It has a streamlined body with fixed wings. It can descend and ascend by using a buoyancy control device, while it moves in the horizontal plane like a glider for long distance. However, the ratio of vertical movement distance to horizontal movement distance is small.