 |
|
|
〈コンピューターが
センサーで判断する事柄〉 |
|
|
|
|
|
|
|
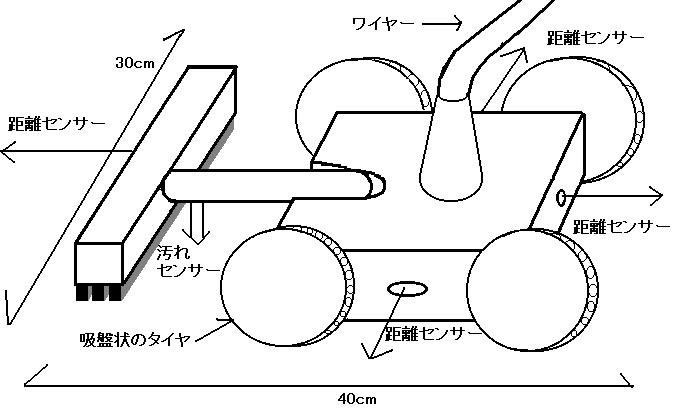
①ブラシの一番手前 : ブラシ 洗剤が出てきて、ブラシで擦る。 ② 二番目 : ワイパー
③ 三番目 : 雑巾
端の部分を先に拭いておき、その後に、

角の部部分を拭くのが難しかしいから、 ①のように一度ブラシを持ち上げて少し後ろに下がり、 そこからブラシをつけて、向きを変える。 そして、また、③のようにブラシを持ち上げて角につけて ブラシを持ち上げて④のようにまた進んでいく。
|
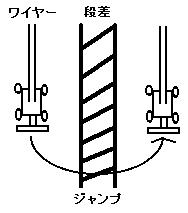
重量がそれほどないので、ワイヤーを利用して、 ぶら下がりながら段差を越える事にした。 ガラスをゴムの棒のような物で軽く押し、 ガラス面から飛び跳ねるような形になり、 そこでワイヤーを動かして、移動する事ができる。 着地するときは、空気を噴出してクッションの役割をさせて、
上下のときも同様に、ワイヤーの長さを変えて移動する。
|
|
掃除のブラシ : 汚れの度合いをセンサーで感知し、それによってブラシの動きを強めたりする。 ひどい汚れがあれば、止まって磨く。 本体の距離センサー : 入力された窓の大きさなどをもとに、自分がどこを拭いているのかを感知し、
タイヤの吸盤 : ガラスに付いている部分の吸盤の吸い付く力を強力にして、
移動時 : ガラスとの距離を感知して、クッションである空気の吹き出すのを調節する。
|
|
ビルについて (階層、高さ、部屋の数、など) 窓のガラスについて (大きさ、数、厚さ、強度、など) 出っ張りについて
(出っ張りのタイプ、大きさ、材質、など)
|
![]()