1.2009年5月16日(土) アクアロボット工作教室の開催
2.2009年5月31日(日) 第3回水中ロボットフェスティバルの開催
|
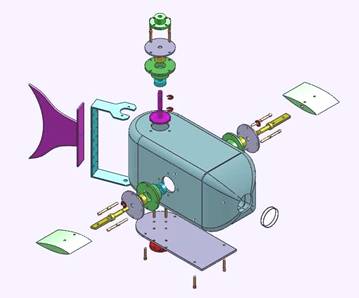
1.アクア・ロボットの概要 アクア・ロボットは、尾ひれ運動で推進し、平面内の運動を行うことができます。胸ひれも左右一対付いており、深度方向の調整に用いることができます。このアクア・ロボットの誘導センサーとして、前面にCMOSカメラモジュールが取り付けられており、これとロボットの内部に装着されているマイクロコントローラ(MCU)によって、水底の線に沿って自律的に泳ぐことができます。このMCUは、カメラからのプロセスイメージとサーボモーターによる尾ひれの位置制御のための処理装置です。CMOSセンサーは、20x15ピクセルグレイスケール画像を捕えて、そのデータをMCUに送ります。MCUは、カメラモジュールからのデータをマトリックス化します。そのマトリックスの各々のメンバーは、8ビットの値です。一定な光源のもとで、ある閾値を設定し、二値化します。これによって、水底の線をこのマトリックスの中で表示することができます。この情報を使って、ロボットの方向と左右位置を制御するために、サーボモーターに指令を出して、尾ひれの動きを制御します。 このロボットの設計は、当研究室の留学生でした Danai Phaoharuhansa さんが行ったものです。
2、アクア・ロボットの工作 5月16日(土)10:00-17;00に、大阪大学工学部において、アクア・ロボットの工作を行 いました。 これは、第3回水中ロボットフェスティバルの行事の一環として、実施し ました。参加者は、奈良高等専門学校から12名、神戸市立高等専門学校から4名、計16名でした。1セットあたり、4人で1チームを編成し、4チームで、工作を行 いました。最後に水槽において、遊泳テストを行いました。 この実施にあたっては、大阪市立大学大学院 工学研究科 機械物理系専攻 高田洋吾 先生には、たいへんお世話になりました。 3 アクア・ロボットの競技 第3回水中ロボットフェスティバルに、高専4チームが参加し、プールの仮底に、テープで周回コースを設置し、そのラインに沿って、自律的に泳がせ、競技を行った。4チームとも、独自に改良を加え、競技に臨 みました。ライントラッキングという高度な競技であったため、各チームとも完走することはできませんでしたが、下の写真の奈良高専Bチームがコーナーを回りきることができ、アクアロボット部門で賞を得 ました。
|