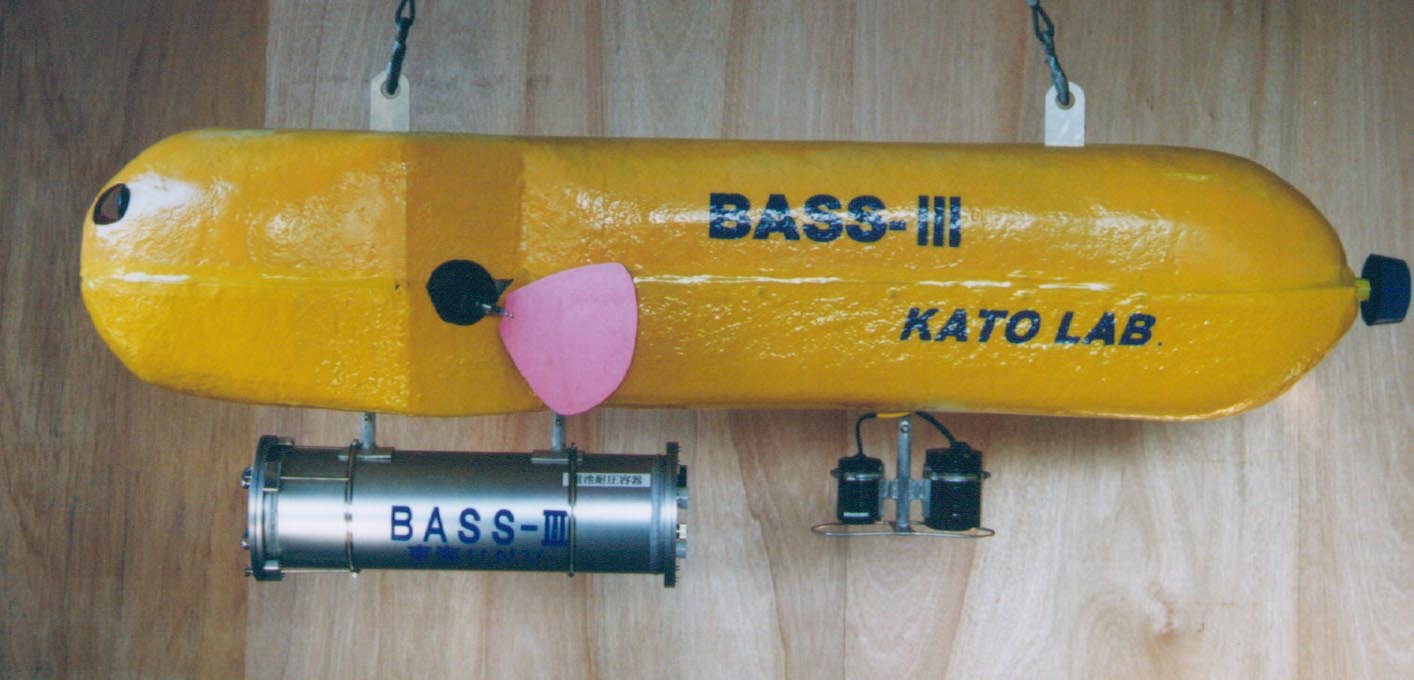
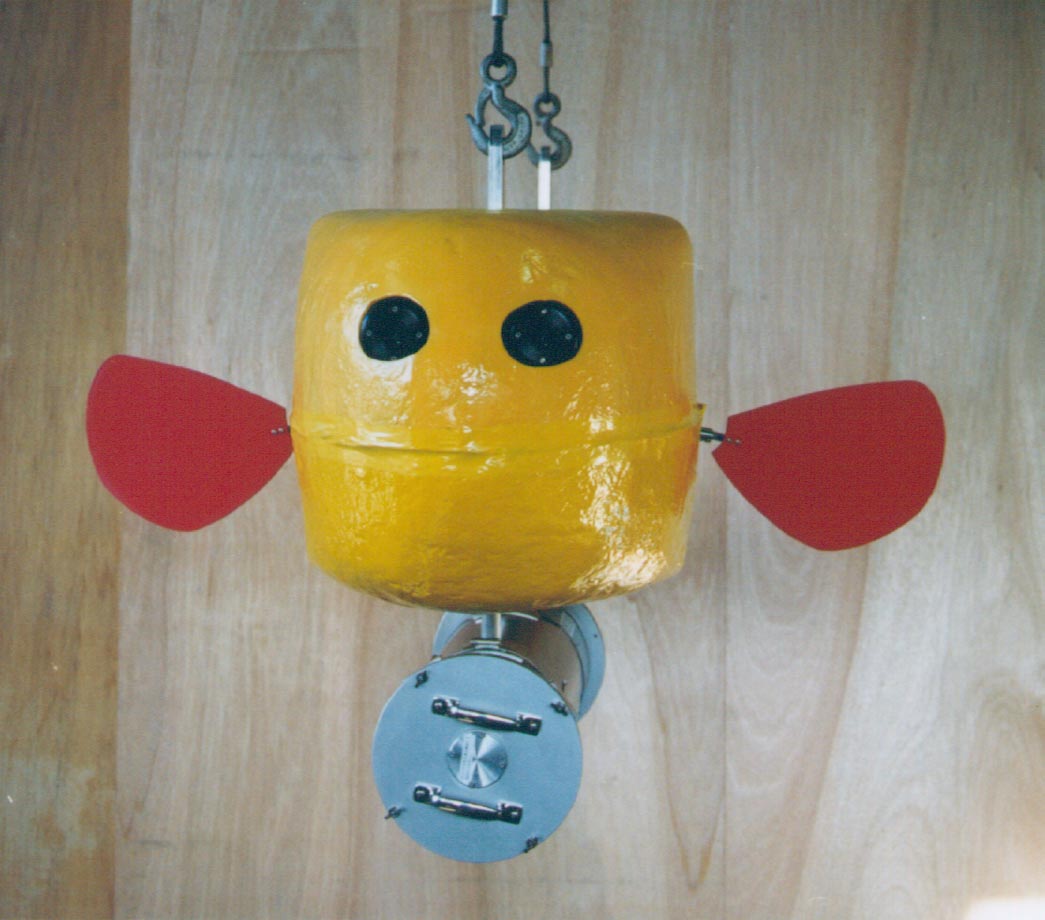
Length: 2 m, Mass
:105.7 Kg
Actuator : One Pair of
3-Motor-Driven Mechanical Pectoral fins and a thruster
Sensors: 3-axes gyros,
3-axes inclinometer, 3 CCD cameras, Depth sensor,
Altimeter
Communication: LAN
Power : Lead-ascid battery
and external power

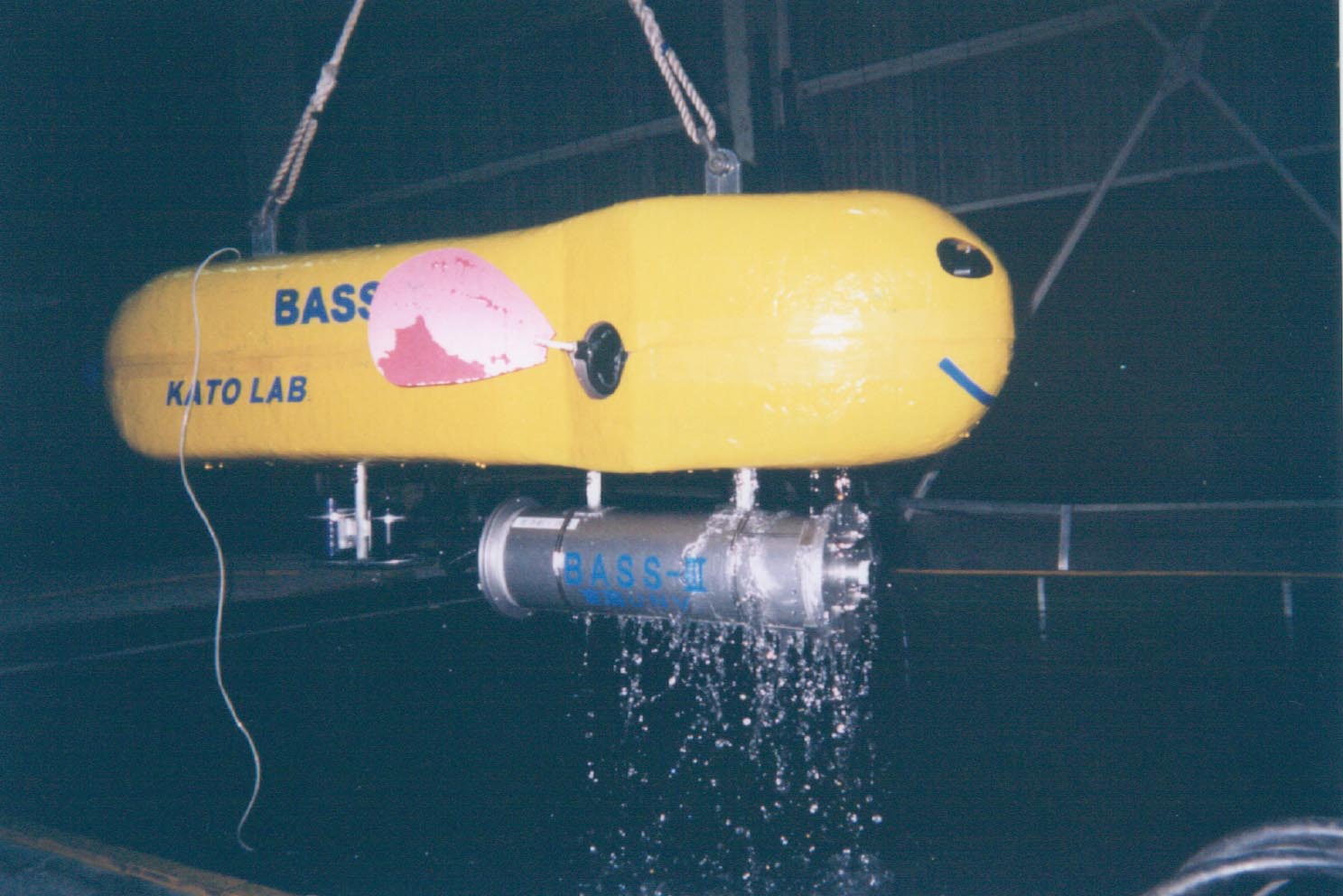
Movies of swimming performance in a
water tank (March 3, 2000)(MPG files)
(1)Ascending
in forward direction
(2)Descending
in forward direction
(3)Ascending
in backward direction
(4)Descending
in backward direction
(5)Left
turning
(6)Lateral
swimming to right hand side
References
(1)N.Kato,M.Furushima,"Experimental
Analyses of Fish Fin Motion",13th Ocean Eng.
Symp.(SNAJ),pp.109-116, 1995, in Japanese
(2)N.Kato,M.Furushima,"Pectoral Fin Model
for Maneuver of Underwater Vehicles",
AUV'96(IEEE ), 1996, June2-6, Monterey,CA
(3)N.Kato,T.Inaba,"Hovering Performance of
Fish Robot with Apparatus of Pectoral Fin
Motion", 10th Int. Symp. on Unmanned,
Untethered Submersible Technology, 1997,
September 7-10, New Hampshire
(4)N.Kato, T.Inaba,"Hydrodynamic
Characteristics of Apparatus of Pectoral Fin
Motion", J. of SNAJ, vol.182, pp.129-139,
1997, in Japanese
(5) N.Kato,T.Inaba,"Control Performance of
Fish Robot with Pectoral Fins in Horizontal
Plane", Int. Symp. on Underwater Technology,
1998, April 15-17, Tokyo pp.357-362
(6) Kato,N. and Inaba, T.: Guidance and Control
of Fish Robot with Apparatus of Pectoral Fin
Motion,
Proc. of 1998 IEEE Int. Conf. on Robotics &
Automation, pp.446-451
(7) N. Kato, "Research Trend on
Aqua-biomechanism," Bulletin of SNJA, No.
830, pp.544-551, 1998, in Japanese
(8) Kato,N, Locomotion by Mechanical Pectoral
Fin, J. of Marine Science and Technology(SNAJ),
Vol.3, No.3(1998)
(9) Kato,N, Hydrodynamic Characteristics of
Mechanical Pectoral Fin, Trans. of ASME, J. of
Fluids Engineering, Vol.121, No.3,pp.605-613
(1999)
(10) Kato,N., Three-Motor-Driven Mechanical
Pectoral Fin、Proc. of 11th International Symp.
on Unmaned, Untethered Submersible Technology,
pp.467-476 (1999)
(11) Kato,N., Application of Swimming Functions
of Aquatic Animals to Autonomous Underwater
Vehicles, Proc. Of OCEANS'99 (MTS/IEEE) (1999)
(12) Kato,N., "Control Performance in
Horizontal Plane of Fish Robot in Mechanical
Pectoral Fins", IEEE Journal of Oceanic
Engineering, Vol.25,No.1, 2000
(13)N.Kato, Pectoral Fin Controllers、MIT Press (Neurotechnology
for Biomimetic Robots、Ed.
J. Ayers)pp.
325-347, 2002
![]()