水陸両棲生物の歩行と遊泳の運動メカニズム
と生物規範型ロボットへの応用

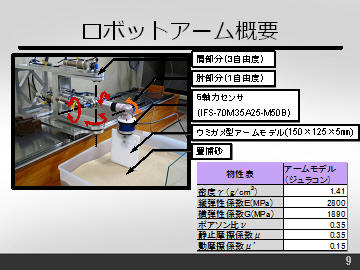
全長1.68(m)、胴体幅0.73(m)、胴体高さ0.55(m)、質量80.0(Kg)。
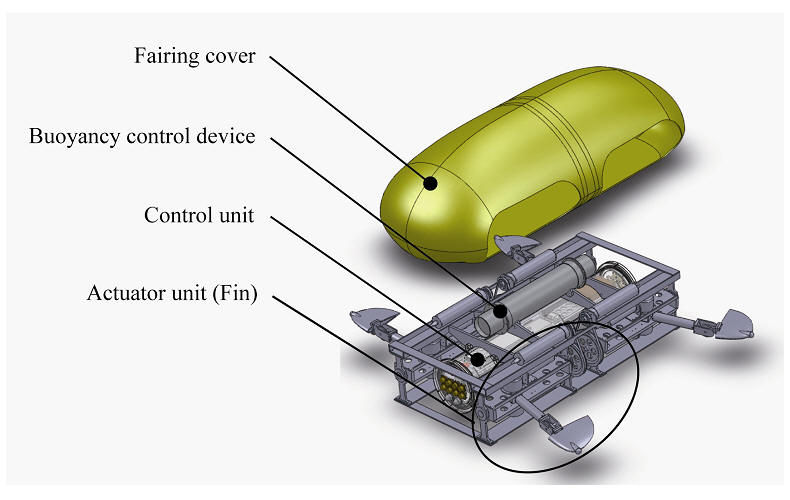
6.カメ型脚部を持つ水陸両用ロボット“RT-I”
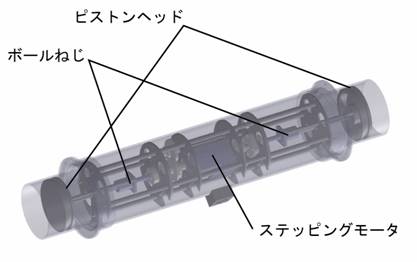
6.浮力調整装置の設計
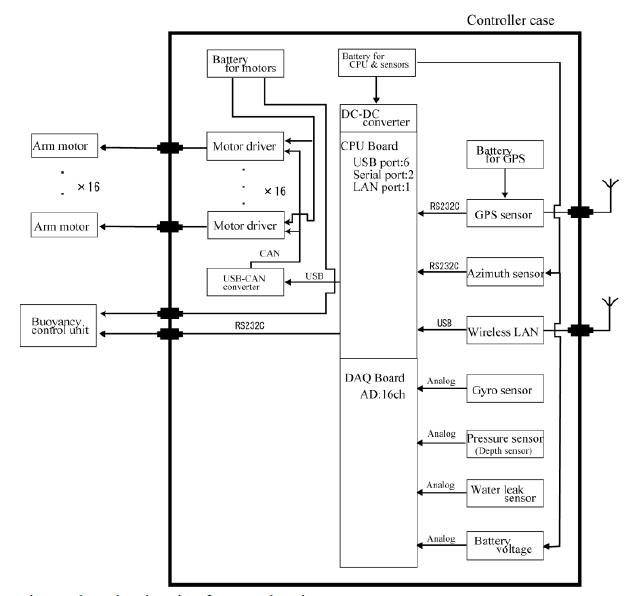
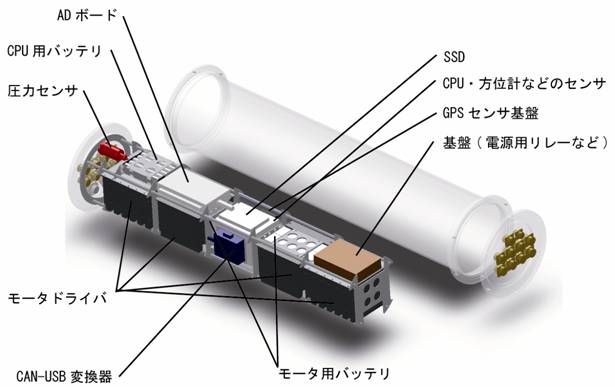
5.制御容器の設計
4.フェアリングカバーとヒレの設計
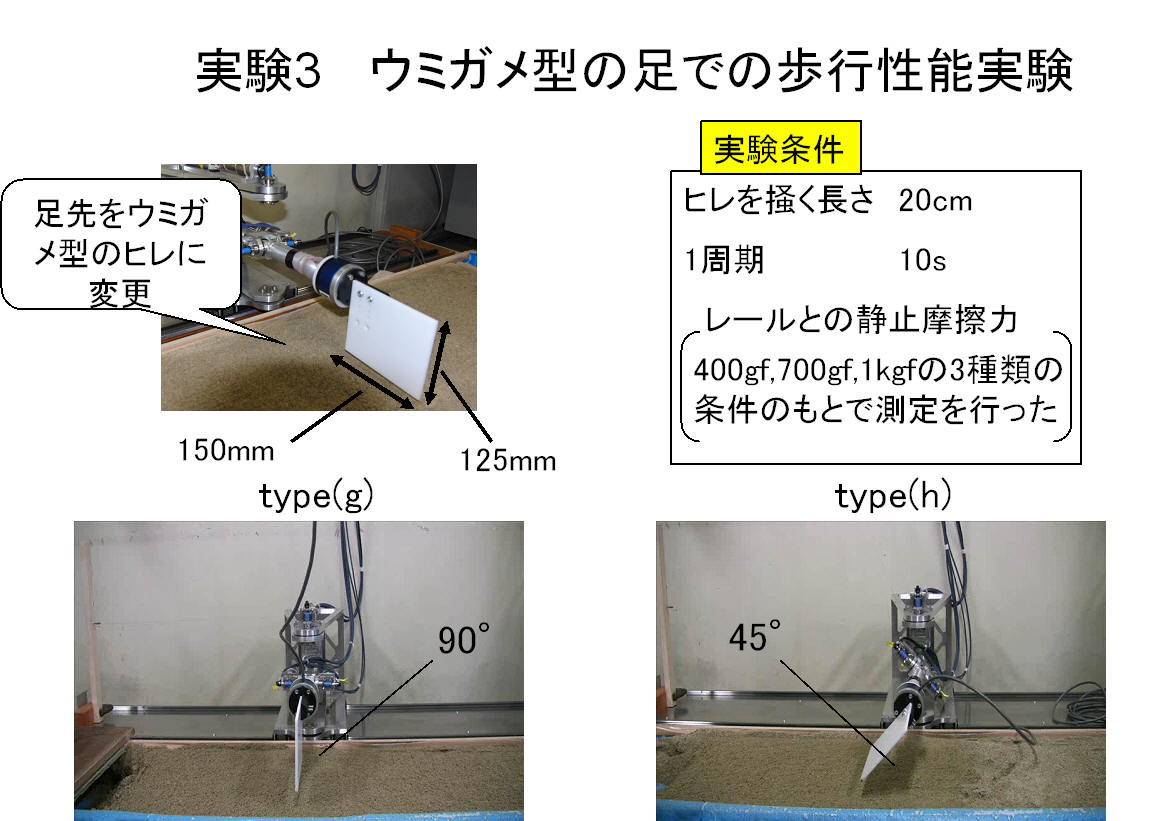
フェアリングカバーの設計にあたって、汎用熱流体解析ソフト「FLUENT」を使用した。ロボット本体の仕様に合わせて、干渉のないように計算モデルを複数作成し一様流中でモデルに働く流体力を計算した。そのモデルの中で最も抵抗値の少なかったモデルを基にFRPでフェアリングカバーを製作した。次に、ロボットのモータの限界トルク、脚のローイング運動、歩行時の接地面との干渉といった機械的制約からヒレ形状を決定し、ABS樹脂でヒレを製作した。
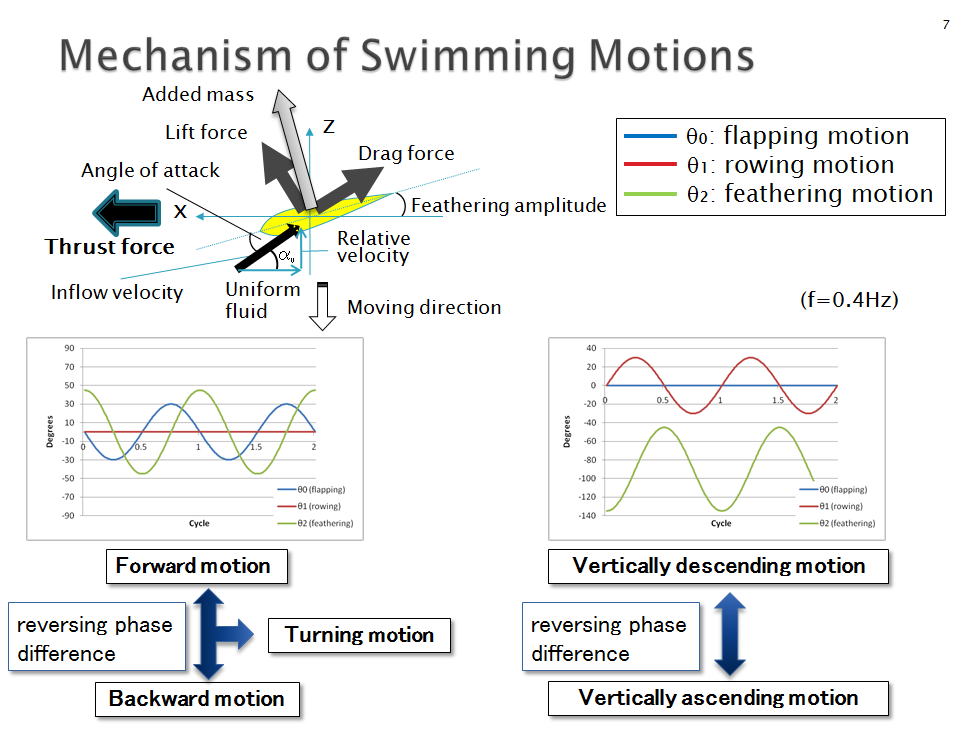
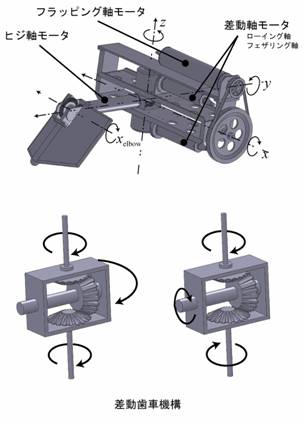
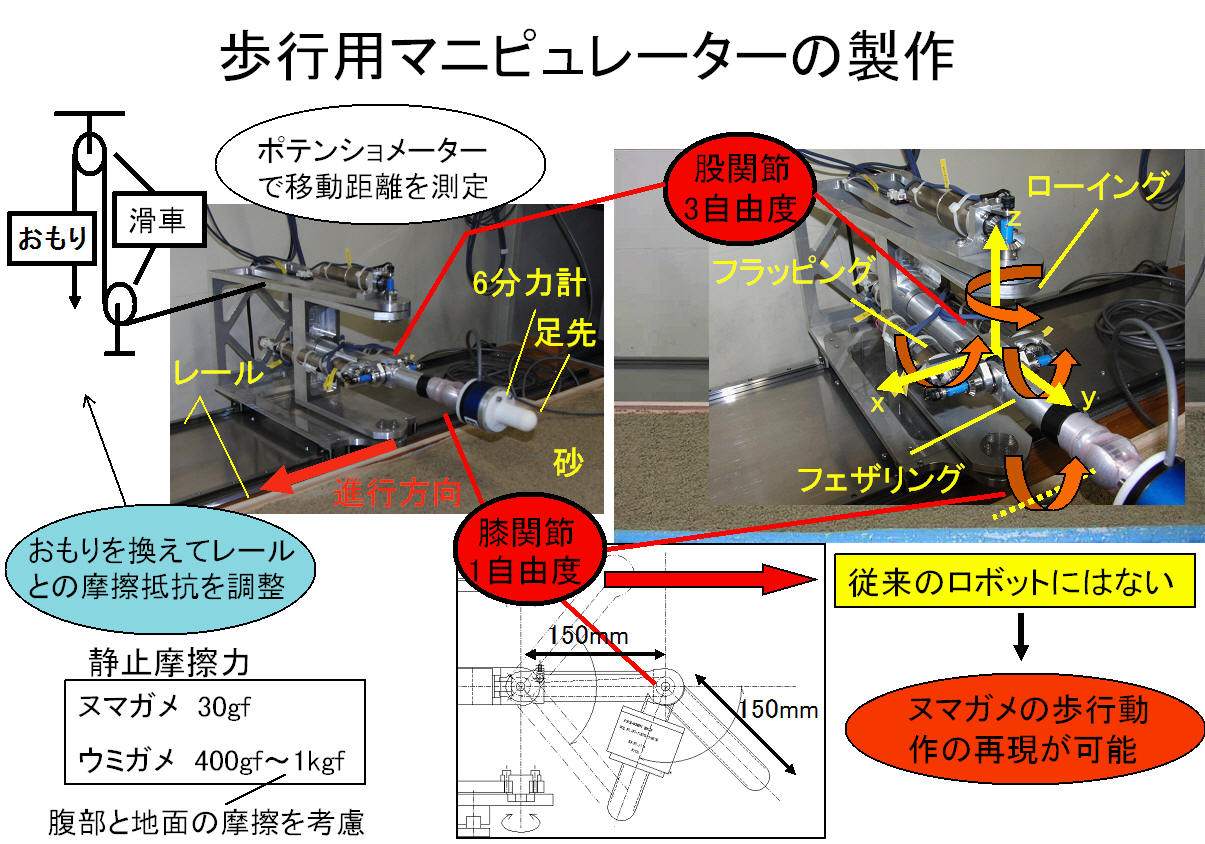
以下 上下運動:フラッピング、前後運動:ローイング、捻り運動:フェザリング、ヒジ周りに1自由度の計4自由度をもつアクチュエータを備えている。肩関節には差動歯車機構を採用し、各自由度の運動の干渉が起きないようにしている。モーターや減速器の選定にあたっては、数値計算(オープンソースの動力学計算用ライブラリ ODE(Open Dynamics Engine)による歩行シミュレーションを用いている。
3. 脚部の設計
3.ロボットの構成
(1)脚部ユニット
(2)制御容器
(3)浮力調整装置
(4)フェアリングカバー
各水密容器は耐水深度10mで設計を行っている。本研究では、これらのハードウェアに加え制御用プログラムの開発も行った。なお,ハードウェアの設計は3次元CADソフトウェア Solid Worksを使用して行った。またプログラムの開発は,計測制御用プログラム開発環境LabVIEW を用いて行っている
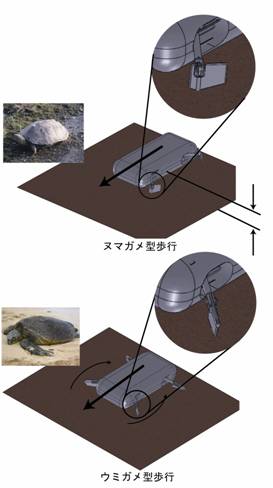
歩行方式
ヒレ型アクチュエータによる歩行動作を検討するにあたって,2通りの方法が候補となった。一つは,ウミガメのように胴体を地面に擦りながら這うように進む方法である。もう一つはアクチュエータにヒジ関節を設けて脚として利用する,ヌマガメのような歩行方法である。それぞれの歩行動作の特徴はつぎのようになる.
ウミガメ型
・転倒の心配がなく安定
・地面の状態が胴体姿勢に強く影響
・地面との摩擦のため水平方向に力が必要
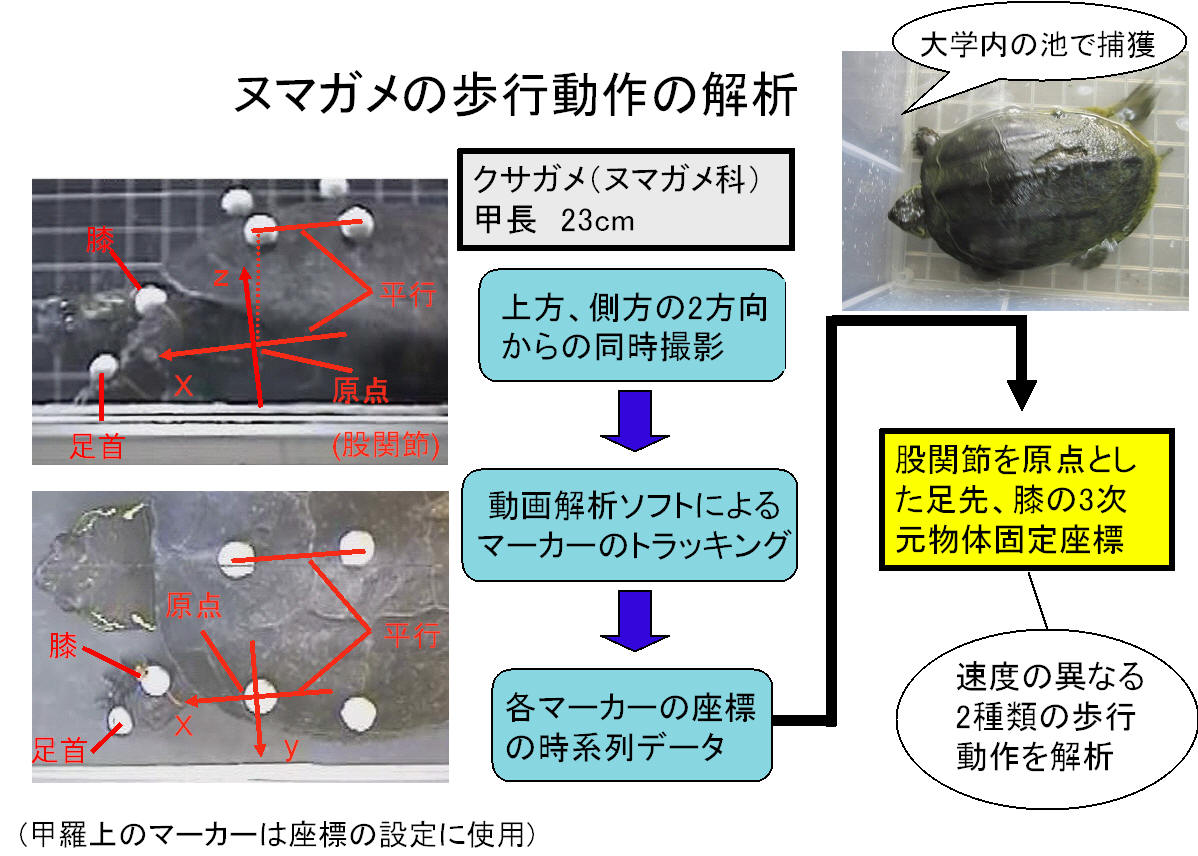
ヌマガメ型
・転倒する恐れがあり比較的不安定
・胴体姿勢にある程度の自由度が存在
・自重支持のため鉛直方向に力が必要
20年度は,これら歩行方法の比較実験が行われ、ウミガメ型の歩行では砂上において前進に十分な推力が生み出せないとの結論が出された.このため,開発するロボットではヌマガメ型の歩行方法を採用する.
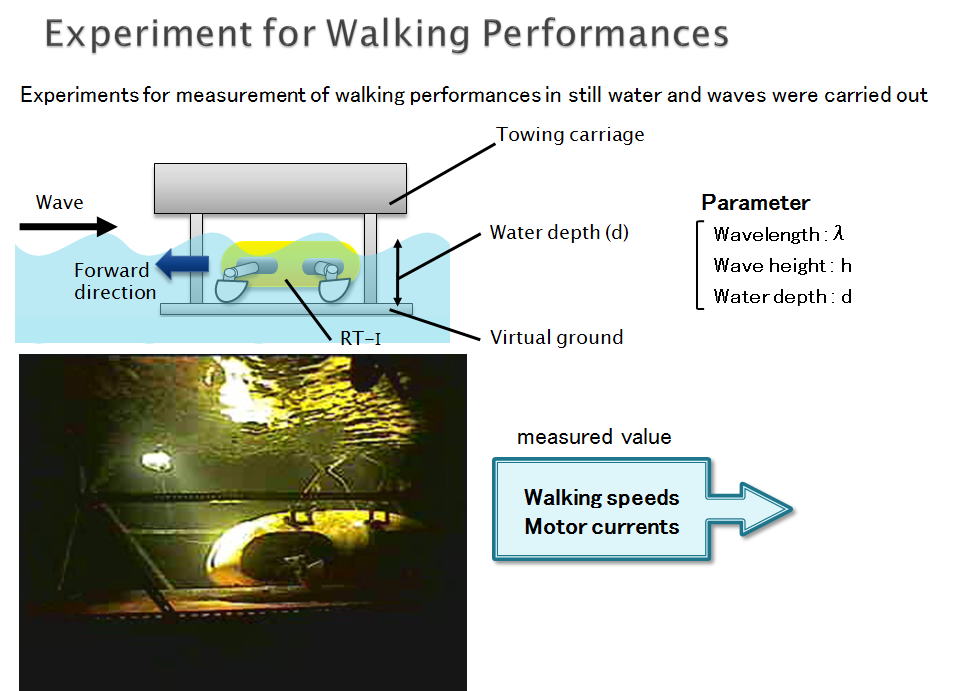
必要に応じて、水深が大きいところでも海底においても歩行を行う。
1.目的とミッション
2次元個別要素法を用いた 砂とロボットアームの干渉シミュレーション
カメ模倣型ロボットの 歩行性能の評価
平成20年度の成果
これまで当研究室で開発を行ってきた胸ヒレ型遊泳方式を用いる。
遊泳方法
陸上から浅水域までは歩行を行い、ある程度水深が大きくなったところから、遊泳に切り替えることを想定した。

ヒレ型アクチュエータを有する水陸両用ロボットの設計と開発
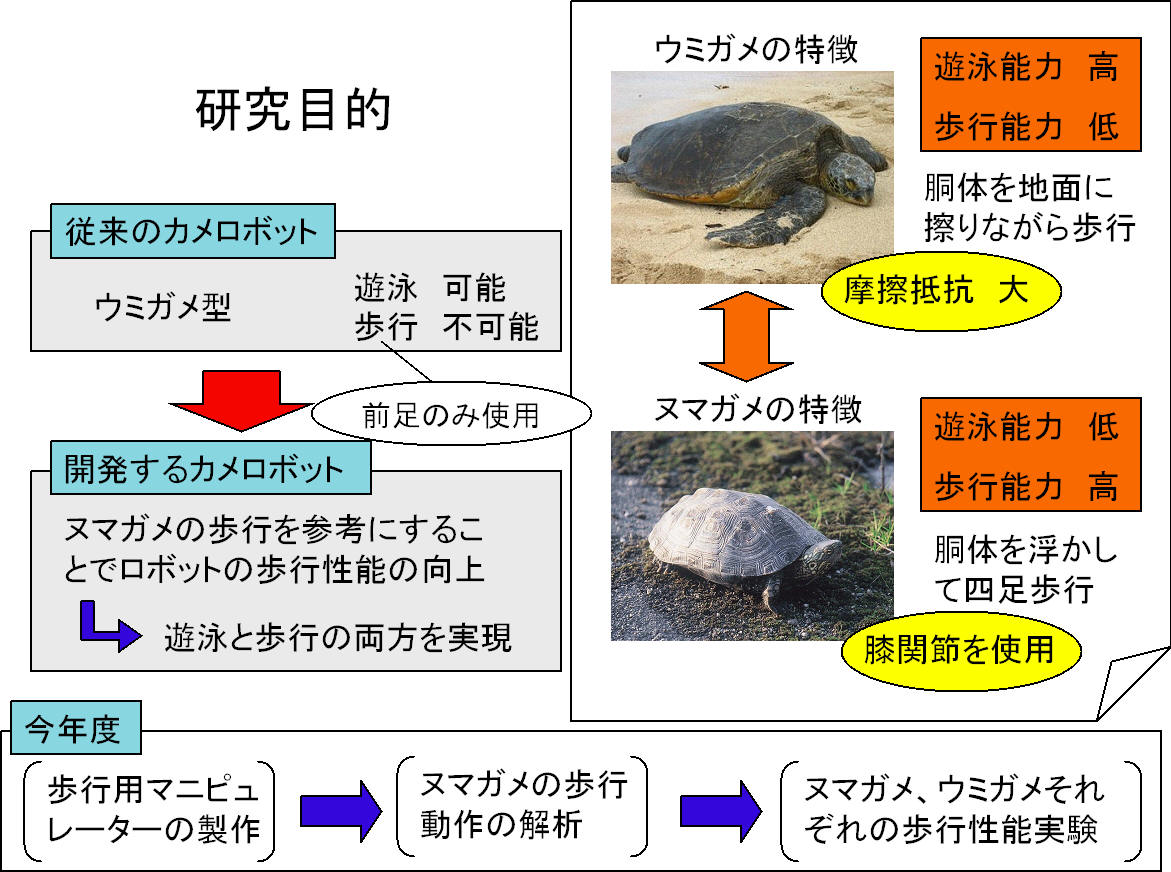
本研究の目的
自然海岸や干潟は沿岸域の海洋環境にとって重要な役割を担っているため、環境モニタリングを行なう必要がある。この作業を調査環境に応じて一体のロボットで行うことができれば効率的であると考えられる。そのためには、水陸両用ロボットの開発が必要となる。キャタピラやプロペラによる移動方法はぞれだけでは移動範囲が限られるばかりでなく、調査水域の環境破壊や砕波帯など流れの速い水中での安定性などの問題点も挙げられる。
そこで、不整地や波や流れの中でも陸から海中まで移動ができる水陸両棲生物に着目し、その生物の運動メカニズムを解明することで、そのロボット開発に生かすことが可能となる。水陸両棲生物には、カバやカモノハシなどの哺乳類、ワニ、ウミヘビ、カメなどの爬虫類、カエルやイモリなどの両生類、ペンギンやウなどの鳥類がある。その中でカメは、甲羅に囲まれた固い胴体に歩行と遊泳を掌る前肢および後肢が付いており、その運動メカニズムは環境モニタリングを行う水陸両用ロボットに生かすことができると考えられる。カメの現生種は約300種とされ、ウミガメ、リクガメ、ドロガメ、スッポンなどの上科に分類される。
これまでも遊泳のみを行うウミガメロボットの研究、歩行と遊泳を想定したウミガメロボットの研究があるが、従来のウミガメロボットは歩行動作の実現が困難であった。それはウミガメの歩行方法が胴体を地面に擦りながら移動するために生まれる摩擦抵抗が原因だと考えられる。リクガメとウミガメの歩行と遊泳の運動解析を行い、さらに4自由度を持ったマニピュレーターによりリクガメ、ウミガメそれぞれの歩行動作を再現し、実験によって歩行性能の評価を行なう(平成20年度)。その後、歩行と遊泳を可能とする自律型ロボットを設計・製作する(平成21年度)。そのロボットの歩行・遊泳性能試験とその評価を実施する(平成22年度)。
この研究は、文部科学省科学研究費 基盤研究(A)「生物規範型水中ロボットの基盤技術の確立と応用展開」(平成20年度〜平成22年度)として行われた。
浮力調整方式としてピストン式を採用している。また,浮力調整時にロボットの姿勢に影響を与えないよう,連動して互いに反対方向に動く2つのピストンを前後対称に配置する構造とした。
制御容器の内部にはCPUやモータドライバのほか,方位計,などのセンサを備える.電源は,モータ用とCPU・センサ用を別系統としている.モータ用電源には, 8.0[Ah]のニッケル水素電池を最大で2直列2並列の構成で使用する.モータ用, CPU・センサ用電源ともに外部からの電源供給も可能な構成としている.
2.ロボットの移動方法
平成21年度の成果
・ロボットの遊泳及び歩行プログラムの作成
・浮力計算を導入した歩行シミュレーターの構築
・実験による遊泳性能の評価
・実験とシミュレーションによる効率的な歩行方法の検討及び水底歩行性能の評価
平成22年度の成果
。
研究論文
1. J. Shimoya, N. Kato, and Y. Kawamura, Estimation
of Walking Performance of an Amphibious Robotic Turtle; Proc. ofISABMEC2009 (The Fourth International Symposium on Aero Aqua Bio-Mechanisms)
2. T. Takamura, N. Kato, and Y. Kawamura,
Simulation of Dynamic Interaction between a Robotic Arm and Sand by 2D-Discrete
Element Method, Proc. ofISABMEC2009 (The Fourth International
Symposium on Aero Aqua Bio-Mechanisms)
3. H. Suzuki, Y. Fukui, S. Ueda, and N. Kato, Numerical Study on Motion
Simulation
4. 河村 嘉将、下谷 純一、吉田 英司、加藤 直三、鈴木 博善、千賀 英敬,ヒレ型アクチュエータを有する水陸両用ロボットの設計と開発,日本深海技術協会 会報 2010年1号 Vol.1, 2010
5. Y. Kawamura, J. Shimoya, E. Yoshida, N.
Kato, H. Suzuki and H. Senga, Design and Development of an Amphibious Robot
with Fin Actuators, Proc. ISOPE 2010 , 2010
6. 加藤直三, 水陸両棲生物の歩行と遊泳の運動メカニズム, バイオメカニズム学会誌, 34(3), 195-202, 2010
7. Y. Kawamura, J. Shimoya, E. Yoshida, N.
Kato, H. Suzuki and H. Senga, Design and Development of Amphibious
Robot with Fin Actuators, International Journal of Offshore and Polar
Engineering Vol. 20, No. 3,
September 2010, pp. 175-180
8. N. Kato , Swimming and Walking of
anAmphibious Robot With Fin Actuators,Marine Technology
Society Journal,Volume 45, Number 4, pp.181-197, 2011