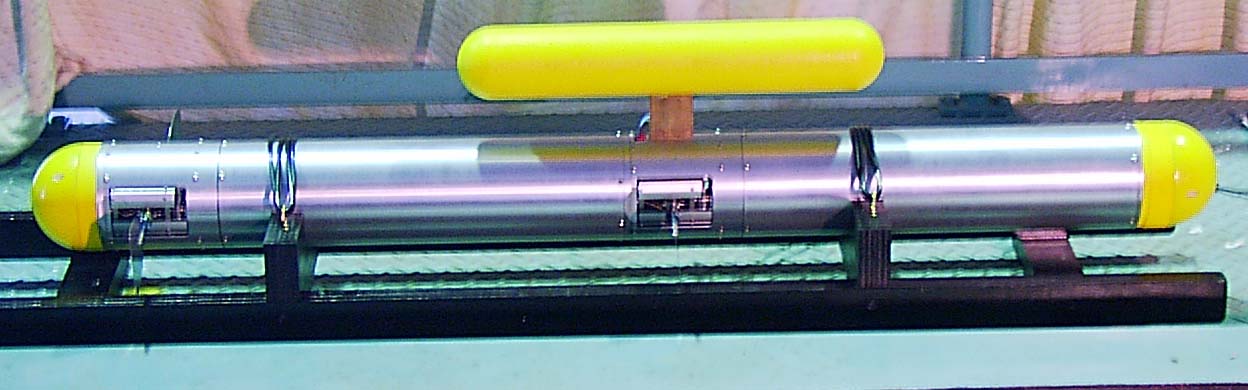
Length:1.36
m、Weight:14.5
Kgf Tethered
2
pairs of Mechanical Pectoral Fins(BIRDFIN)
CPU, Attitude
Sensors、Motion
Sensors of BIRDFINs、
Force
Sensors on BIRDFINs
Acoustic
Localizing Device (LBL method)
movie of PLATYPUS(September,
2002) (10,556 KB " forward_2hz.mpg")
Remodeled PLATYPUS

movie Guidance and control around a
cylinder of remodeled PLATYPUS in water currents
(January,2005) (16Mb)
参考文献
- N. Kato, H. Liu and H. Morikawa Biology-Inspired Precision
Maneuvering of Underwater Vehicles
Proceedings
of 12th International
Offshore and Polar Engineering Conference, pp.269-276、2002
- N. Kato, H. Liu and H. Morikawa Biology-Inspired Precision Maneuvering of Underwater Vehicles(part 2)
Proceedings of 13th International
Offshore and Polar Engineering Conference, pp.178-185、2003
- Kato,N., Liu, H. and Morikawa, H.(2003)
Precision Maneuvering of Underwater Vehicles Equipped with Two Pairs of
Mechanical Pectoral Fins, Proc. of 2nd Int. Symposium
on Aqua Bio-Mchanisms
- Kato,N. and Liu, H.(2003) Optimization
of Motion of a Mechanical Pectoral Fin, JSME International Journal, Vol.46, No.4, pp.135
- Kato,N., Liu, H. and Morikawa, H.(2004)
Biology-Inspired Precision Maneuvering of Underwater Vehicles(Part3), Proc.
of 14th Int.
Offshore and Polar Engineering Conference, p.274
- Kato,N., Ando,Y. and Shigetomi,
T. (2004) Precision Maneuvering of Underwater Robot by Mechanical Pectoral Fins,
Proc.
of 2004 Int. Symp. On Underwater Technology, IEEE
- Kato,N. (2004) Median and Paired Fin Controllers for Marine Vehicles, ASME
Applied Mechanics Review
- Kato,N., Liu, H. and Morikawa, H.
(2004) Biology-Inspired Precision Maneuvering of Underwater Vehicles in Bio-mechanisms
of Swimming and Flying (Edited by Kato, Ayers and Morikawa) Springer-Verlag,
Tokyo
-
Kato,N., Liu, H. and Morikawa, H. (2004).”Biology-Inspired
Precision Maneuvering of Underwater Vehicles(Part 3),” Int. J. of Offshore
and Polar Eng., Vol.15, No.2, pp.81-87
-
N. Kato, Y. Ando, T.
Shigetomi and T. Katayama (2006) Biology-Inspired Precision Maneuvering of
Underwater Vehicles (Part 4), International Journal of Offshore and Polar
Engineering,Vol.16, No.3, p.p. 195-201

