
Many marine animals thrive in near shore, high-energy environments where rapidly changing flow velocities created by surges, currents, and breaking waves present extreme challenges to precision maneuvering and hovering performance. The ability of near-shore animals to achieve extraordinary stability and precision hovering is one key to their survival in wave-swept environments. Many near-shore fishes employ one or more pairs of oscillating fins to increase both stability and maneuverability. It is reasonable to believe that these highly maneuverable fishes serve as excellent biological templates for the design of man-made vehicles with extreme maneuvering and stealth capabilities. This project describes a multi-year development program to develop an improved understanding of the practical applications of oscillating fins and to demonstrate the utility of replacing cumbersome thrusters with a suite of oscillating fins designed to optimize the hovering and low speed maneuvering performance of an undersea vehicle. Japanese team involves three major components, (1)development and validation of analytic models describing the dynamic forces produced by fin motions, (2)development of a control approach that mimics the hovering fish motion, and (3)implementation of these concepts on an undersea vehicle. American team involves two major components, (1) review available information on the motion of pectoral fins of several types of swimming in low speeds or hovering under disturbances such as water currents or waves, (2)experimentally assess the kinematics of pectoral fin motion during hovering.
・ Compact 3MDMPF device with high speed capability and precise movement
Independent generation of flapping motion, rowing motion and feathering motion
(Legth of cylinder : 0.5 m, Max. frequency: 3 Hz)
・Underwater Robot with Mechanical Pectoral Fin”PLATYPUS"
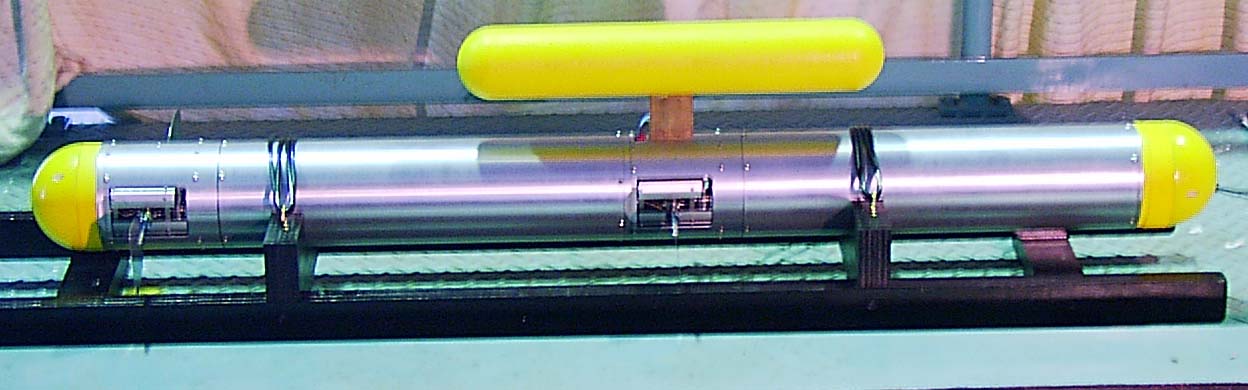
movie of PLATYPUS(September, 2002) (10,556 KB " forward_2hz.mpg")
Remodeled PLATYPUS

movie Guidance and control around a cylinder of remodeled PLATYPUS in water currents (January,2005) (16Mb)
Reference
![]()