水棲動物の地磁気情報による海洋移動の
水中ロボットへの応用
研究概要
長距離航行用AUV(Autonomous Underwater Vehicle)のナビゲーションは、主に水中音響灯台と慣性航法装置を用いて行われている。これはスタート地点からゴール地点までの間に中継点としておよそ30km間隔でトランスポンダを設置するものである。AUVは水中音響灯台により慣性航法装置による航路を補正することでゴール地点に到達することができる。しかし、この方式で1000km単位の長距離ナビゲーションを行う場合は非常に多くのトランスポンダが必要となる。また、海面を厚い氷で覆われた極地などでの水中音響灯台の使用は困難である。
そこで地磁気を一つの位置情報として利用し、海洋を長距離移動するアカウミガメのナビゲーション行動に着目した。アカウミガメはアメリカ合衆国フロリダ東岸で孵化した後、海岸から沖合いを目指して泳ぎ、North Atlantic gyre という北大西洋を循環する大きな海流にたどり着く。ここでアカウミガメは成長のためにNorth Atlantic gyreの中に留まる必要があるが、この海流にはいくつかの支流が存在するため、自分の位置が特定できなければ、支流に流されて本来の分布域から遠く離れてしまう危険がある。しかしアカウミガメには地磁気を感知する能力がありそれを定位に利用しているということが(Lohmann,1994)によって明らかにされている。
AUVに取り付けられた3軸地磁気センサ、深度センサおよび高度センサからのデータを用いて、地磁気マップ、海底地形マップから現在位置の緯度、経度を推測し、目的地までの経路誘導を行うAUVナビゲーションシステムの構築を目的とする。
最近の研究成果
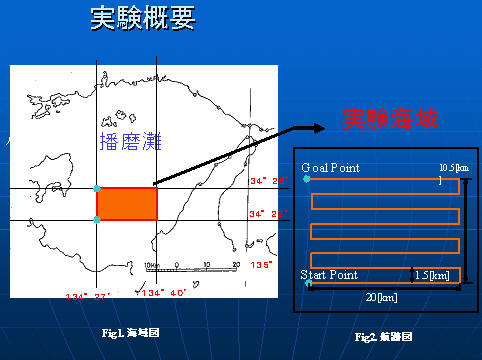
海洋実験(播磨灘)
参考文献
1. 片瀬剛志 加藤直三、水生動物の地磁気情報による海洋移動の水中ロボットへの応用、ロボティクス・メカトロニクス講演会'03(日本機械学会)、2003
2. 片瀬剛志 加藤直三、水生動物の地磁気情報による海洋移動の水中ロボットへの応用、第17回海洋工学シンポジウム(日本造船学会)、2003年7月
4
重富 俊秀、織茂洋平、濱田大介
5. Shigetomi, T., Orimo,Y., Hamada,T and Kato,N. "Study on Underwater Navigation System For Long-Range Autonomous Underwater Vehicles Using Geomagnetic and Bathymetric Information", 3rd Int. Sym. on Aero Aqua Bio-mechanisms (ISABMEC2006), 2006
6. Hamada T., Shigetomi T. , Orimo Y. and Kato N., "Study on Underwater Navigation System For Long-range Autonomous Underwater Vehicles Using Geomagnetic and Bathymetric Information", Proc. of 14th Int. Offshore and Polar Engineering Conference,2007
7.Naomi Kato, Toshihide Shigetomi Underwater Navigation for Long-Range Autonomous Underwater Vehicles Using Geomagnetic and Bathymetric Information Advanced Robotics Vol.23, No.7-8 787-803 2009
![]()