
Elastic Pectoral Fin Actuators for Biomimetic Underwater Vehicles
This research is being conducted for three years from 2005
funded by the Ministry of Education, Culture, Sports, Science and Technology (Grant
No. 16360435)
as a joint
project between Osaka University and Okayama University( Suzumori laboratory)
Objectives
This research has objectives of developments of new pectoral fins made of elastic materials with the functions of flexibility and multifunctionality for biomimetic underwater vehicles to use as not only a propulsive device, but also other applications such as grippers, avoiding damages to environment by rigid fins. We developed two types of elastic pectoral fins, an actively controlled pneumatic fin and a passively controlled flexible fin in this study. We carried out the verification tests for generating the propulsive forces and FEM analyses of the behaviors of two elastic pectoral fins.
Contents
ACTIVE PNEUMATIC ACTUATOR FIN
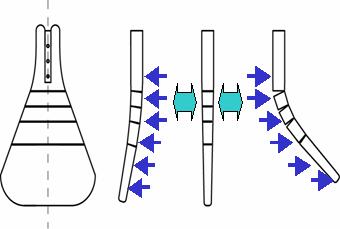
The Active Pneumatic Actuator Fin(see Fig.3) consists of three Flexible Micro Actuators (FMAs) and the web made of elastic materials. The FMA has three pressure chambers inside the rubber tube.We can make the APAF produce feathering motion by controlling the pressures in the nine chambers APAF only needs flapping motion by the motor to generate propulsive forces using a lift-based swimming mode with small angles of attack against uniform flow, whereas the former rigid mechanical pectoral fin needs both flapping and feathering motions for the lift-based swimming mode.
Fig.3 Active Pneumatic Actuator Fin
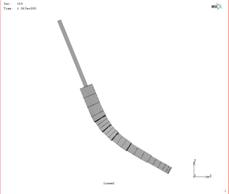
FE Analysis of Flexible Micro Actuator

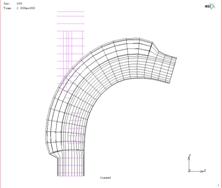
Fig.
Behavior of FMA at
0.2MPa
Fig. FE analysis of feathring motion
Fig. Comparison of displacement between experiment and FE analysis
Propulsive Performance by the Active Pneumatic Actuator Fin
PASSIVE FLEXIBL
The Passive Flexible Fin (PFF) is made of silicon rubber with the transverse grooves on the surface in one side. Utilizing the difference of the thrust generation between both sides during 1 cycle, we can make the PFF perform the drag-based swimming mode consisting only of rowing motion.

FE Analysis of Passive Flexible Fin
Propulsive performance by the Passive Flexible Fin
1. The transverse grooves on one side of a Passive Flexible Fin contribute to the generation of the propulsive forces during the power stroke and to the decrease of the drag forces during the recover stroke.
2. FE analysis fairly well expresses the dynamic behaviors of the Passive Flexible Fin experimentally measured by the image analysis quantitatively.
3. The Active Pneumatic Actuator Fin can produce feathering motion required for the lift-based swimming mode by controlling the pressure in the chambers.
4. We have succeeded in analyzing the highly non-linear behaviors of a FMA alone.
References
1.S. Endo, K. Suzumori, T. Kanda, N. Kato, H. Suzuki, Y. Ando,Flexible and Functional Pectoral Fin Acutuator for Underwater Robots, The 3rd International Symposium on Aero Aqua Bio-mechanismsISABMEC 2006, S42, p.55, (2006-7)
2.Y. Ando, N. Kato, H. Suzuki, K. Suzumori, T. Kanda, and S. Endo, Elastic Pectoral Fin Actuators for Biomimetic Underwater Vehicle,Proc. of 16th Int. Offshore and Polar Eng. Conf.(CD-ROM)(ISOPE), 2006
3. Y. Ando, N. Kato, H. Suzuki, K. Ariyoshi, T. Suzumori, T. Kanda, and S. Endo, Elastic Pectoral Fin Actuators for Biomimetic Underwater Vehicles, The 3rd International Symposium on Aero Aqua Bio-mechanisms(ISABMEC 2006)(CD-ROM). 2006