現在活躍している潜水艇の多くはスクリュープロペラ型のスラスターと翼によって運動や姿勢制御が行われている。この方式では、素早い旋回、上下運動、ホバリングなどを行うのが難しいのが現状である。本研究では、水中を素早く動き回る魚の鰭の運動パターンを調べ、潜水艇の新しい姿勢制御法の発見を目的としている。
上図に示すオオクチバス(通称 ブラックバス)を観察し、各鰭の連動性と胸鰭の運動特性を調べた。次に、胸鰭の運動模型を製作し、流体特性を調べた。
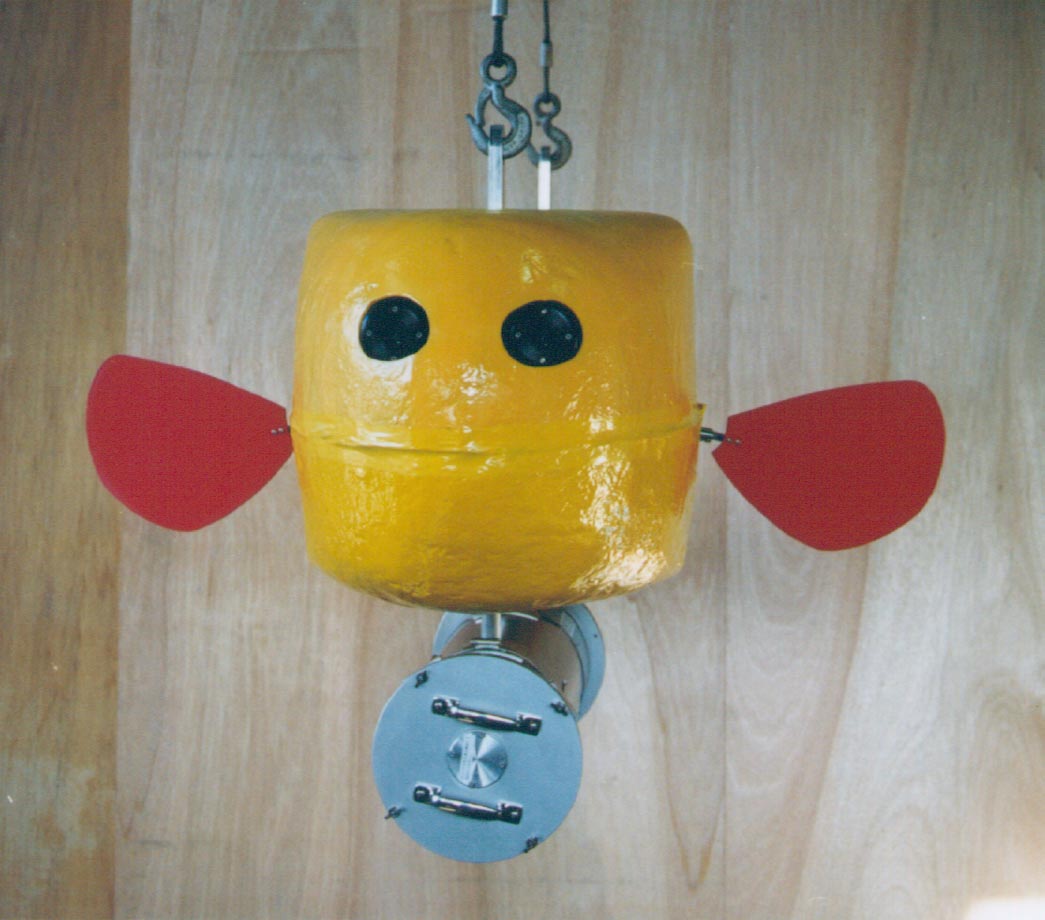
小型鰭運動装置を製作し、これにブラックバスの胸鰭の時系列データを入力し、模型の流体特性および運動特性を調べ、”ブラックバスロボット”を遊泳実験に成功した。下に、ブラックバスロボットの写真と動画 を示す。
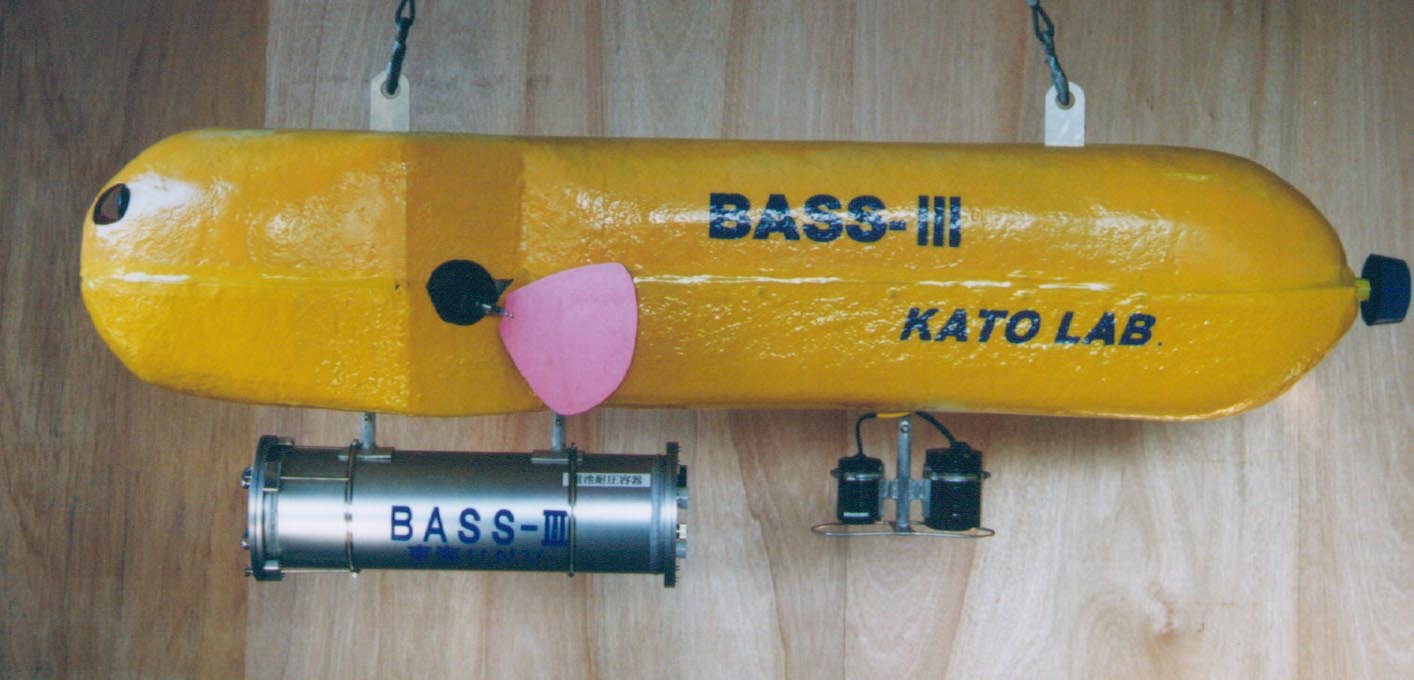
・自律式魚型水中ロボット”BASS III”の製作(完成:1999年1月20日)
全長 :2 m、質量:105.7Kg
アクチュエータ:三軸胸鰭運動装置一対、スラスター一機
センサー :三軸ジャイロ、三軸傾斜計、深度計、高度計、CCDカメラ(前方2台、下方1台)
通信 :LAN
電力 :外部電源およびバッッテリ(鉛電池)

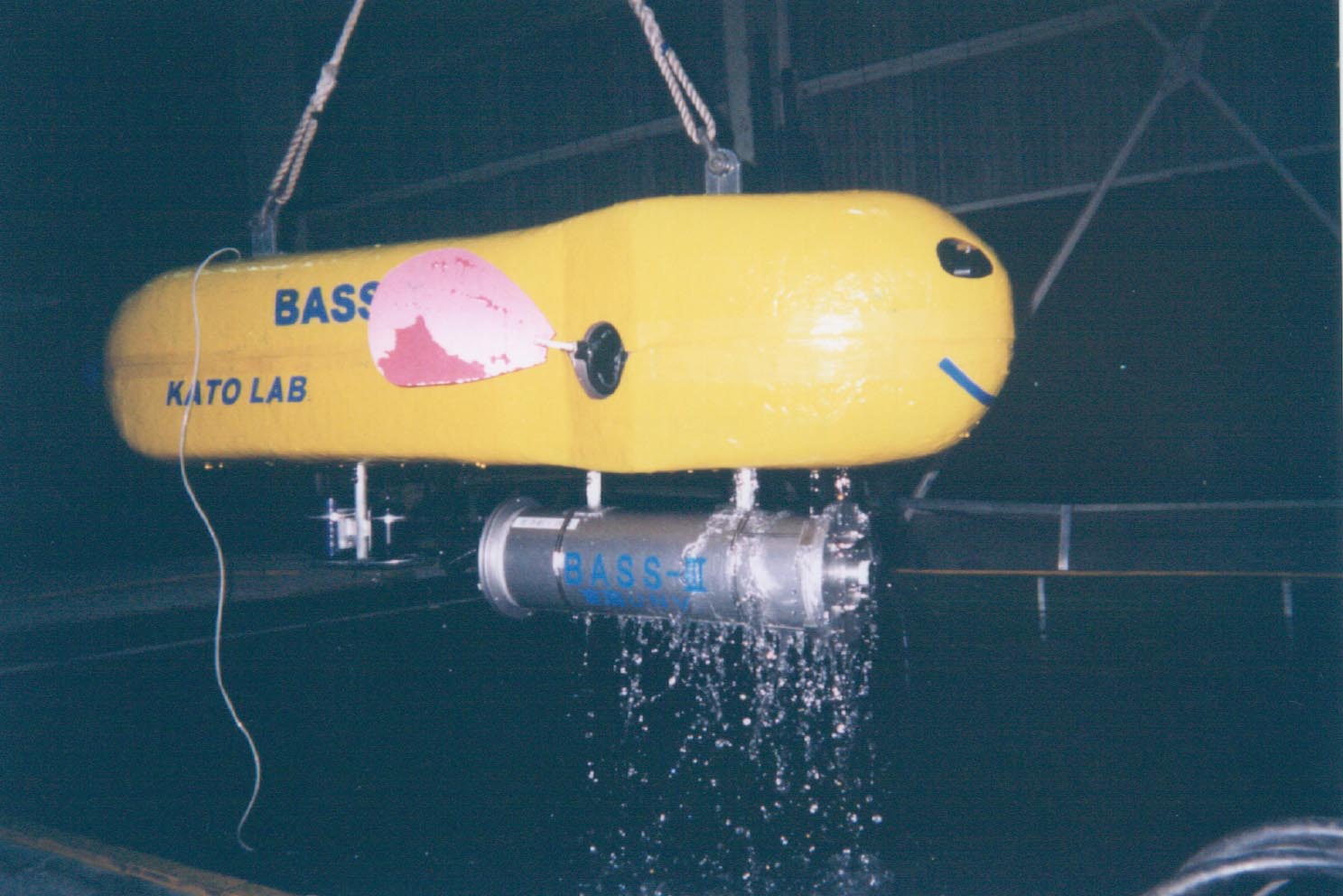
BASS III
の水槽での遊泳試験(胸鰭運動装置のみ作動)(MPG
ファイル)
(1)前進・上昇(2.9MB)
(2)前進・下降(3.0MB)
(3)後退・上昇(2.9MB)
(4)後退・下降(3.1MB)
(5)左旋回(4.0MB)
(6)右横移動(4.0MB)
(1)加藤、古嶋:魚の鰭の運動解析、第13回海洋工学シンポジウム(日本造船学会)、pp.109-116,
1995
(2) 加藤、古嶋:魚の鰭の運動解析に基づく胸鰭運動装置の開発、第1回ロボテクスシンポジア(日本ロボット学会、計測自動制御学会、日本機会学会)発表、1996.5
(3)N.Kato,M.Furushima,"Pectoral Fin Model for Maneuver of
Underwater Vehicles", AUV'96(IEEE ), 1996, June2-6,
Monterey,CA
(4)N.Kato,T.Inaba,"Hovering Performance of Fish Robot with
Apparatus of Pectoral Fin Motion", 10th Int. Symp. on
Unmanned, Untethered Submersible Technology, 1997, September
7-10, New Hampshire
(5)加藤、稲葉:胸鰭運動装置の流体力学的特性、日本造船学会論文集、第182号、pp.129-139,
1997
(6) N.Kato,T.Inaba,"Control Performance of Fish Robot with
Pectoral Fins in Horizontal Plane", Int. Symp. on Underwater
Technology, 1998, April 15-17, Tokyo pp.357-362
(7) N.Kato,T.Inaba,"Guidance and Control of of Fish Robot
with Apparatus of Pectoral Fin Motion", Proc. of 1998 IEEE
Int. Cinf. on Robotics and Automation, 1998, pp.446-451
(8)
加藤:アクアバイオメカニズムの研究動向、日本造船学会誌、第830号、pp.544-551,
1998
(9) Kato,N, Locomotion by Mechanical Pectoral Fin, J. of Marine
Science and Technology(SNAJ), Vol.3, No.3(1998)
(10) Kato,N, Hydrodynamic Characteristics of Mechanical Pectoral
Fin, Trans. of ASME, J. of Fluids Engineering, Vol.121,
No.3,pp.605-613 (1999)
(11) Kato,N., Three-Motor-Driven Mechanical Pectoral Fin、Proc.
of 11th International Symp. on Unmaned, Untethered Submersible
Technology, pp.467-476 (1999)
(12) Kato,N., Application of Swimming Functions of Aquatic
Animals to Autonomous Underwater Vehicles, Proc. Of OCEANS'99
(MTS/IEEE) (1999)
(13) Kato,N., "Control Performance in Horizontal Plane of
Fish Robot in Mechanical Pectoral Fins", IEEE Journal of
Oceanic Engineering, Vol.25,No.1, 2000
(14)
アクアバイオメカニズム研究の海洋工学への応用
(第16回海洋工学シンポジウム(日本造船学会)、2001年
(15)
N. Kato ,"Pectoral
Fin Controllers in “Neurotechnology for Biomimetic Robots,” edited
by J. Ayers, J.J. Davis and A. Rudolph, The MIT Press, pp.325-347,2002
![]()