This research, funded by Promotion Fund for Development of Environmental Technology of Ministry of the Environment from 2006 to 2007, was conducted as a joint project between Osaka Univiersity, Port and Airport Research Institute(PARI), and Akishima Laboratory (Mitsui Zosen) Inc.. After that, it is being conducted as joint project between Osaka Univ. and PARI.
Background
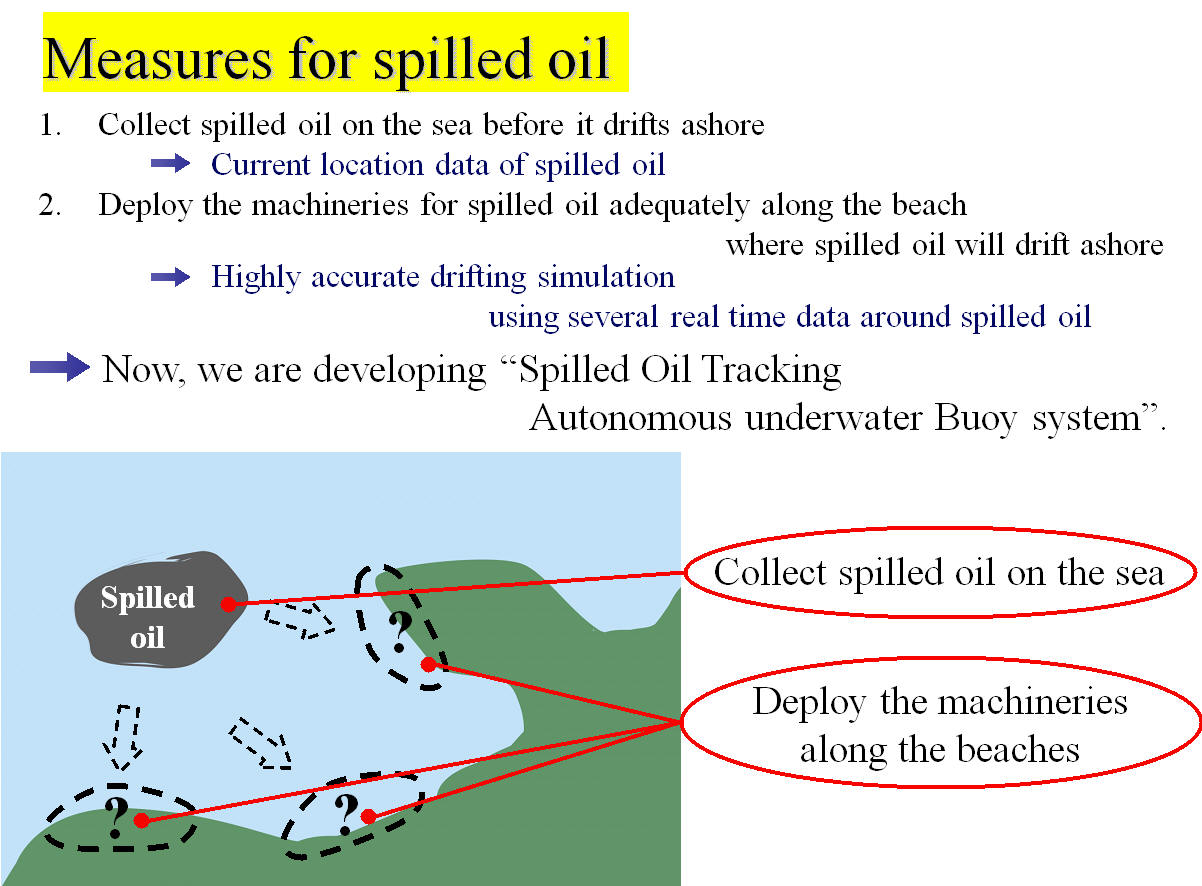
Because Spilled oil by an accident of oil tanker becomes highly
viscous through emulsion by mixing with water in waves, it gives a huge damage
on natural environment and local economy after drifting ashore. It is important
to precisely predict the drifting of the spilled oil using real time information
on its location and environmental conditions to withdraw it ashore utilizing
equipment and materials effectively. However, there exists no system tracking the
spilled oil automatically just after an accident of oil spill and sending real
time information on its location and environmental conditions.
1st Stage
Outline of Research
(1) Design of configuration of spilled oil chasing buoy robot and automatic control system
ü@
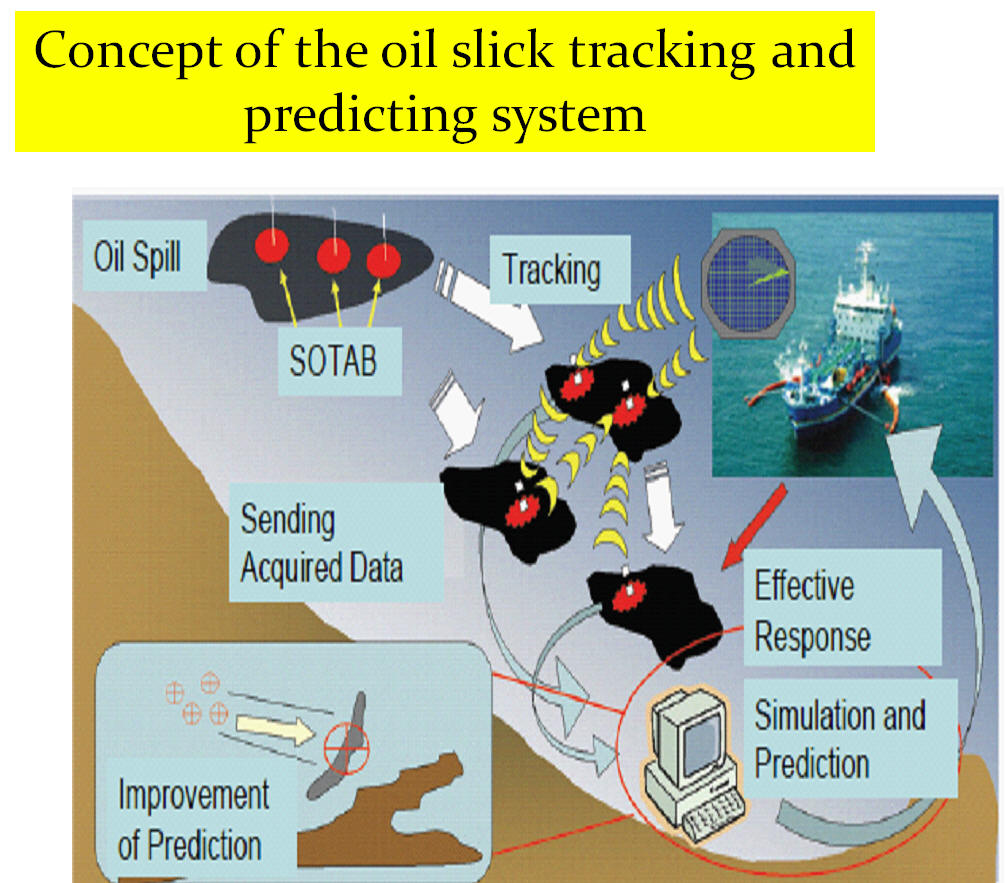
Configuration automatic control system of spilled oil tracking buoy robot with the functions of sensing and sending oceanographic information and spilled oil information on location and characteristics in real time, and automatically chasing spilled oil are designed.
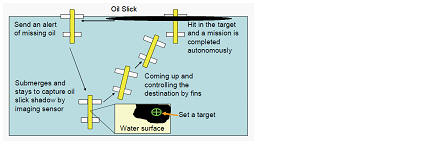
(2) Development of contact and noncontact sensors of
spilled oil on sea surface, and spilled oil tracking autonomous buoy system, and
construction of monitoring system on land
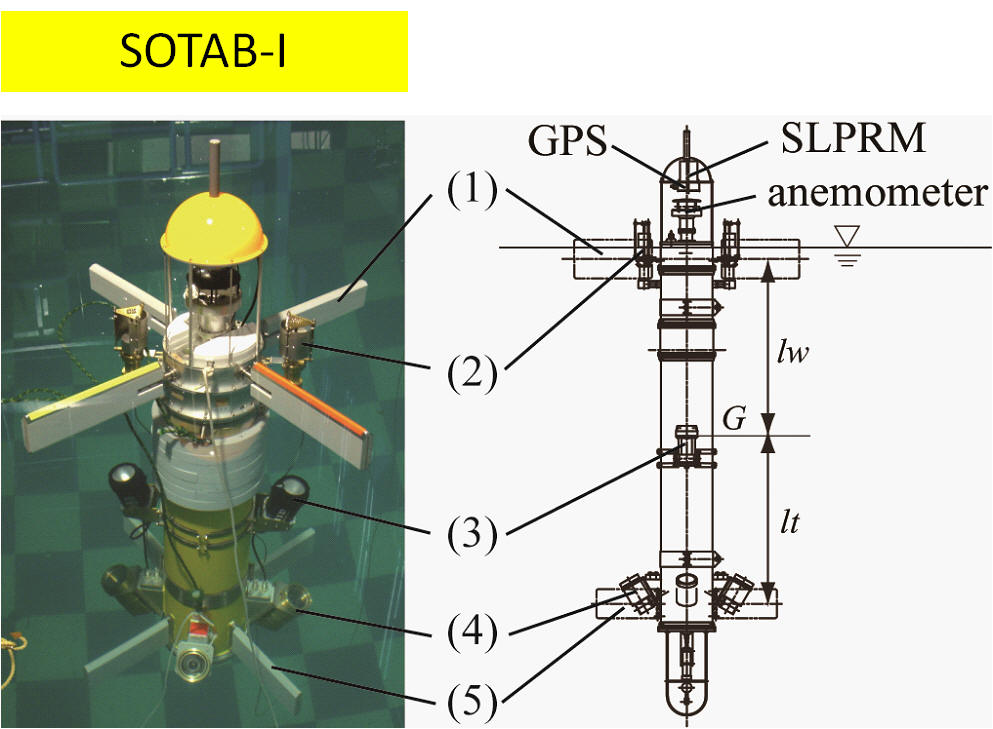
Contact and noncontact sensors of viscosity of oil and localization of spilled
oil are developed. A buoy robot installing contact and noncontact sensors of
spilled oil, measurement instruments of atmospheric and oceanographic dataüCéféoér
receiver, transmitter of measured data in real time receiver of data from land
is constructed. Monitoring system of sent data from the buoy system on land is
also developed.
(3) Performance test of spilled oil autonomous tracking buoy robot in water tanks and at sea
Performances of transmitter and
receiver of information on buoy robot, and automatically spilled oil tracking
are tested in water tanks. After that, sea experiment using monitoring system on
land is carried out to evaluate the effectiveness of spilled oil autonomous
tracking buoy robot.
Outcome and
Expected Effects
ć@ Outcome
Real time data on location of spilled oil, atmospheric and oceanographic
data, and characteristics of spilled oil are transmitted on land monitoring
system by autonomously tracking spilled oil using buoy robot.
ćA Expected effects
These real time data make it possible éöo precisely predict the drifting of the spilled oil on its location and environmental conditions to withdraw it ashore utilizing equipment and materials effectively. This leads to reductionü@of hazards on natural environment and reduction of harmful effect on local economy.
ü@

References
1)H. Senga, N.Kato, A. Ito, H. Niou, M. Yoshie, I. Fujita, K. Igarashi, E. Okuyama, ügSpilled Oil Tracking Autonomous Buoy System,üh Advanced Robotics, Vol.23, No. 9, 2009 , pp. 1103-1129.
2) M. Yoshie, Y. Matsuzaki, I. Fujit, K. Takezaki, N. Kato, H. Senga, and T. Tanaka,"At-sea Trial Test of an Autonomous Buoy which Tracks Drifting Oil and Observation of In-situ Data Tracking Drifting Markers on the Sea for Predicting Location of the Spilled Heavy Oil," Proceedings of Int. Offshore and Polar Eng Conf, 2009, pp.437-444.
ü@
2nd Stage
ü@
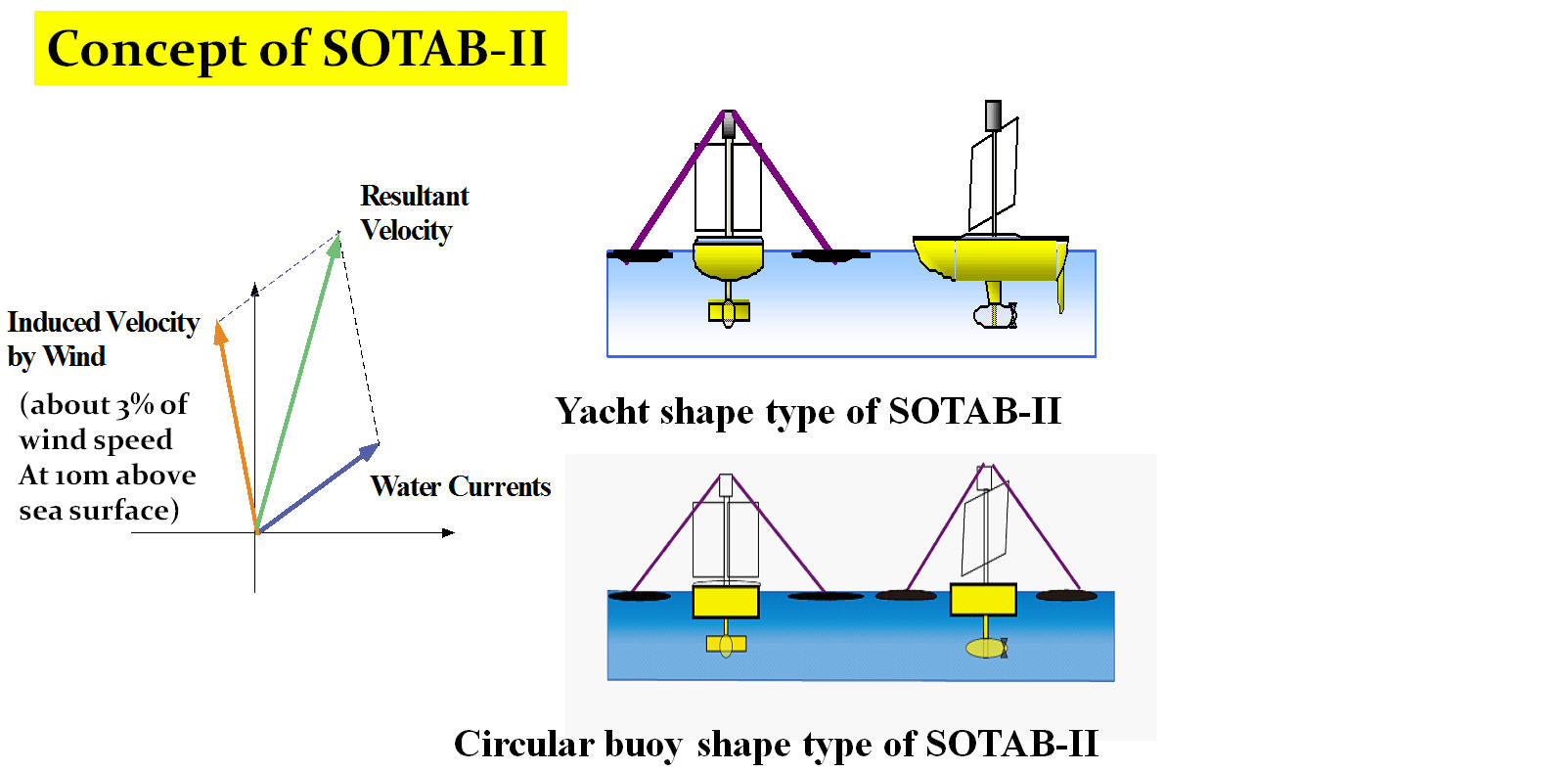
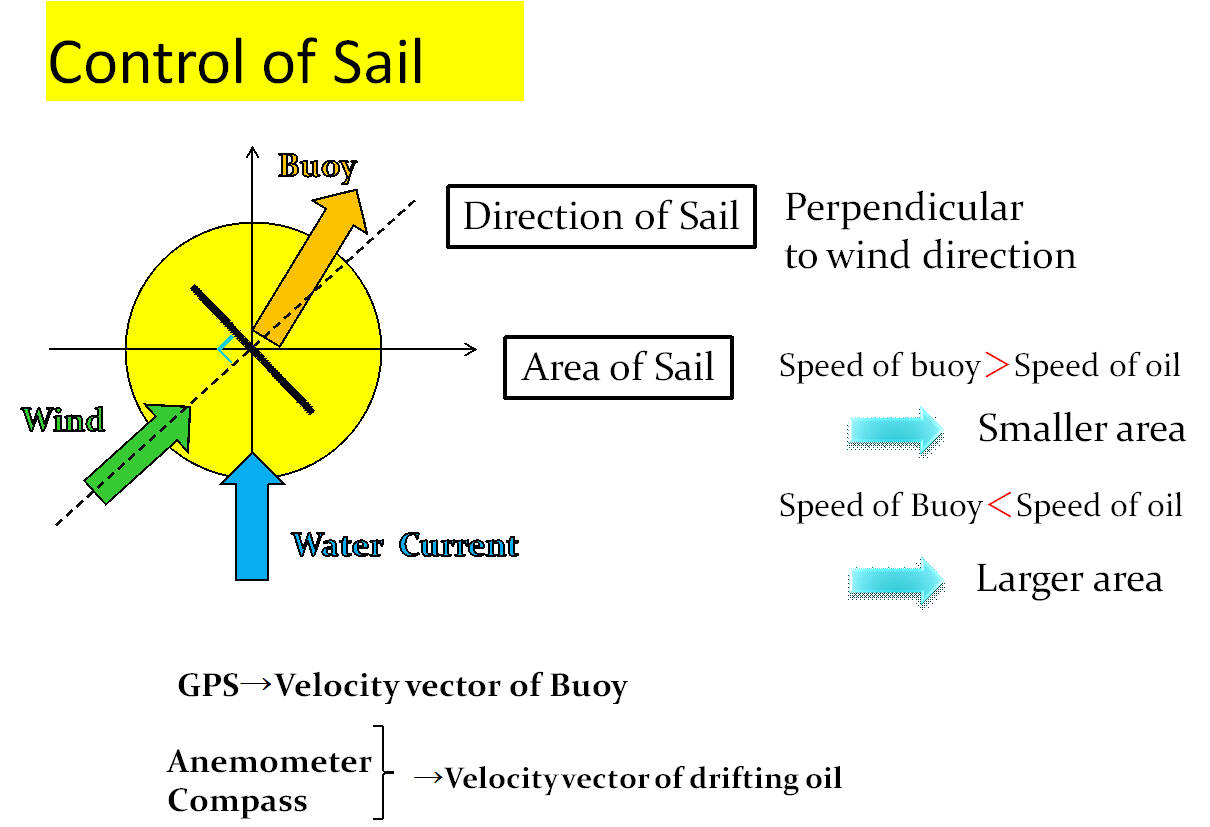
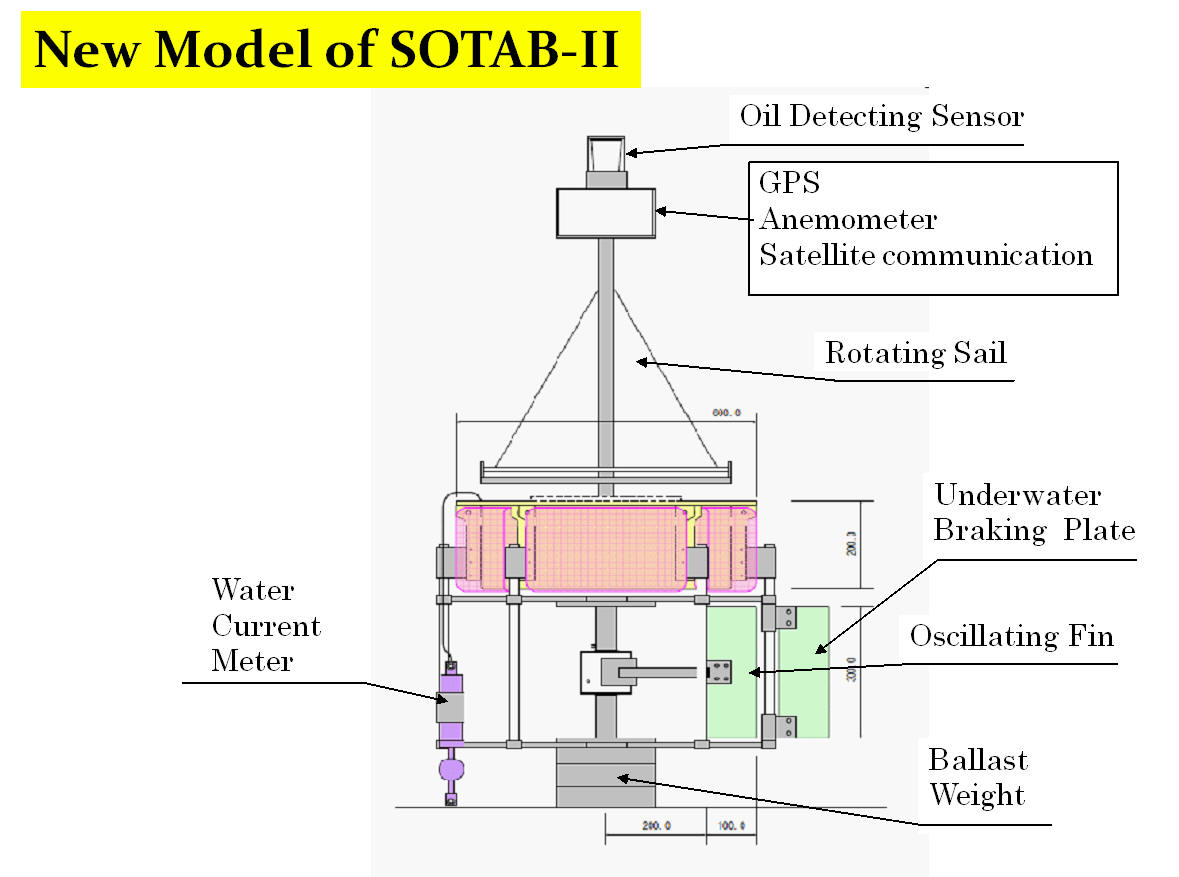
SOTAB-II has a function to drift not only along water currents, but also along induced velocity by wind. To fulfill the function, SOTAB-II has a form of floating buoy equipped with a sail.
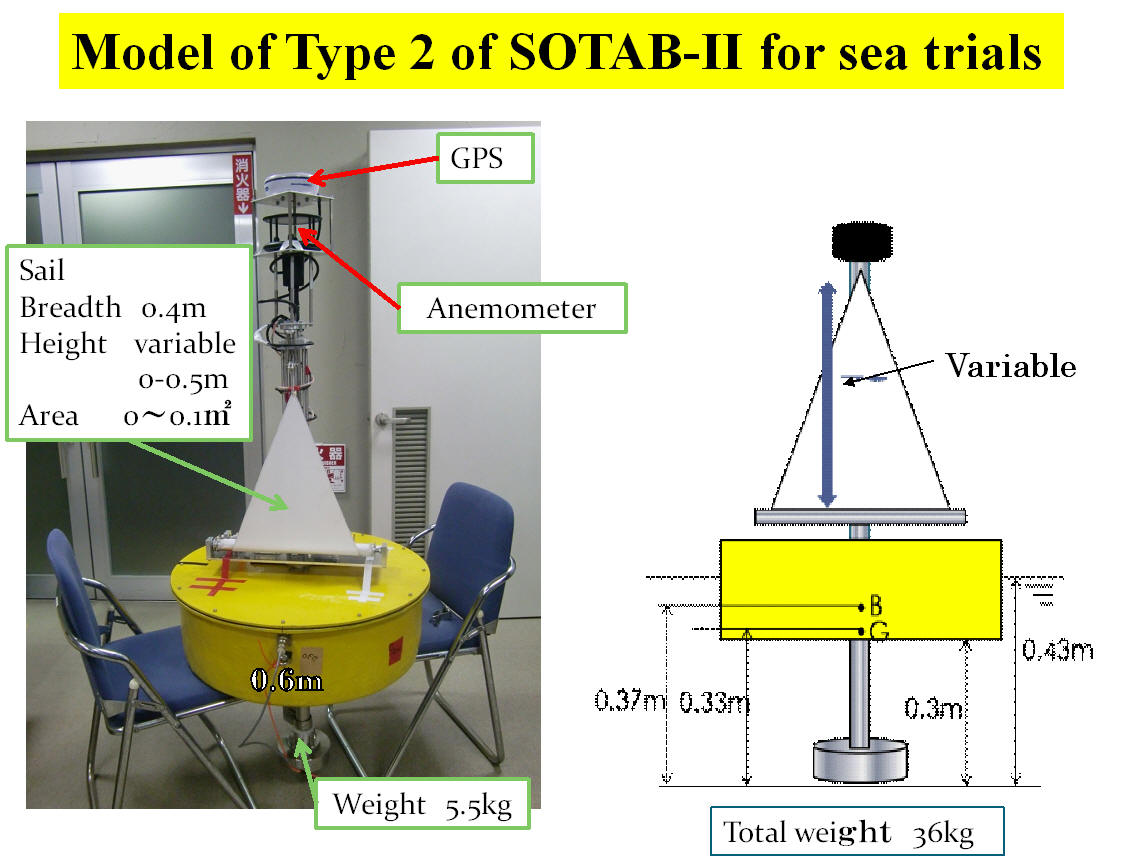
Yacht shape type of SOTAB-II has a sailboat shape. A GPS antenna, an anemometer, a spilled oil detecting sensor, and an antenna for satellite communication are equipped on the top of the mast. The drifting velocity is controlled by the sail area, the sail direction, and the rudder of the sailboat. Circular buoy shape type has a cylindrical main body. The drifting velocity is controlled by the sail area, and the sail direction.
ü@
ü@
ü@
References
1) N. Kato, H. Senga, Y. Suzuki, M. Yoshie, I. Fujita, T. Tanaka, "Spilled Oil Tracking Autonomous Buoy," OCEANS2010(IEEE/MTS), Proc. (CD-ROM)
2)M. Hiratsuka, N. Kato, Y. Suzuki, H. Senga,M. Yoshie, I. Fujita, T. Tanaka, "Steady Sailing Performance of Spilled Oil Tracking Autonomous Buoy with Yacht Shape,", Proc. ISOPE2010, Vol.2, pp.1064-1068
ü@
ü@
ü@