|
||
 |
 |
 |
|
|
|
||
|
|
|
|
|
|
【プレスリリース】大阪、 2002年1月22日
大阪大学は同大学院工学研究科船舶海洋工学専攻長谷川和彦教授が同大学「海のITS」実験池においてインテリジェント・シップの模型実験に成功したと発表した。
長谷川和彦教授(船舶操縦制御学)は国土交通省の「海のITS」プロジェクト(平成12年度~15年度)の主査であり、そのプロジェクトに関連して平成12年度に輻輳海域シミュレータを開発した。輻輳海域シミュレータでは例えば、東京湾や大阪湾全体の海上交通シミュレーションができる。
平成13年度、同教授はインテリジェント・シップの模型実験に成功した。インテリジェント・シップは-GPS、ジャイロスコープ、ワイヤレスLANとコンピュータを搭載し、輻輳海域シミュレータと通信できる。シミュレータはサーバとして働き、上図に示すような任意の海域を航行するすべての船舶の航行管制、制御を行うことができる。また、シミュレータはインターネット上の外部の計算機と通信してその計算機が搭載された船舶をもシミュレータ内の船舶として扱うことができる。したがって、シミュレータと交信できる模型船はシミュレータからの指令により自船の予定航路を自動航行しながら、他船の動きに応じて海上衝突予防法に則り、衝突回避などの措置をとることができる。実験では模型船は直進航路を航行しながら、途中、横切りや行き会いの他船を自動的に避けながらもとの航路に復帰して航行する場面などを再現する。次の写真はこの模型船が旋回中のようすを示したものである。
 |
||
 |
||
 |
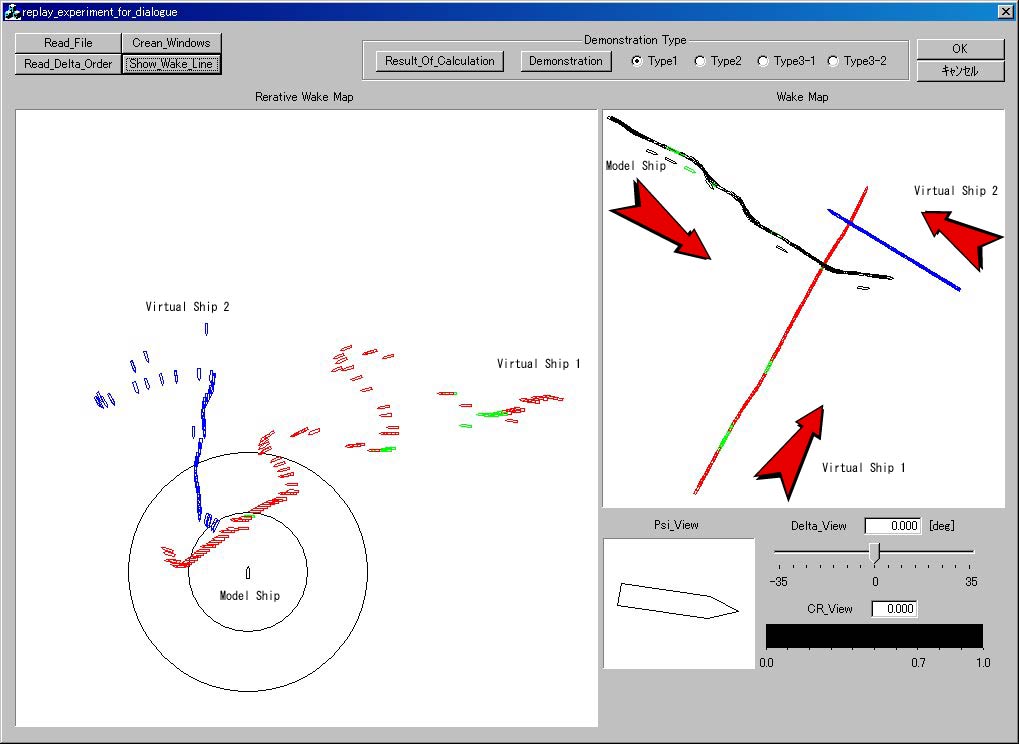
黒:模型船(左上から右下に航行)
赤(左下ー>右上)、青(右中ー>左上):航行する他船(輻輳海域シミュレータ内の仮想船)
左:模型船を中心とした相対航跡、右:絶対航跡
図中の緑の時点で衝突危険度が高まり、輻輳海域シミュレータが避航指令を発令した模型船は最初、赤の船に対して避航を行い、原針路に復帰するころ、第3船(青)が近づいてきたため、さらに避航を続け、両船に対して安全になってから原針路に復帰した。なお、模型船(黒)の航跡で時々、右側に飛んでいるのはGPS信号が飛んだためである。
お問い合わせ先 大阪大学大学院工学研究科 船舶海洋工学専攻 教授 長谷川和彦 hase@naoe.eng.osaka-u.ac.jp