|
||
 |
 |
 |
|
|
|
||
|
|
|
|
|
|
[Press Release] Osaka, Jan.22, 2002
Osaka University has announced that Prof. Kazuhiko Hasegawa, Department of Naval Architecture and Ocean Engineering, Graduate School of Engieering, Osaka University has succeeded to conduct model exeperiment of "Intelligent Ship" at the Marine ITS Model Basin of the University.
Prof. Kazuhiko Hasegawa, engaging in ship manoeuvrability and automation for his research, is supervising the national project of "Marine ITS" for FY2000-2004. In the project, he has developed Intelligent Marine Traffic Simulator in FY2000, which can solve whole traffic simulation in a certain area such as Tokyo Bay or Osaka Bay.
In FY2001, he has also conducted a model experiment of "Intelligent Ship", where she avoids other vessels or obstacles automatically during performing her original mission. The model is utilizing RTK-GPS, gyro and wireless LAN linked with onboard computeres and "Intelligent Marine Traffic Simulator". The simulator works as a server which can govern all ships in the controlled area as shown in the above figure. The simulator can accept any external ship(s) as its client(s). The model can receive appropriate command from the simulator according to the movement of other vessels nearby her as well as her original mission. In the experiment, the model ship will navigate straightly, but another vessel virtually created by the simulator will cross or meet her during her mission. The following pictures demonstrates the movement of the model ship during her turning experiment.
 |
||
 |
||
 |
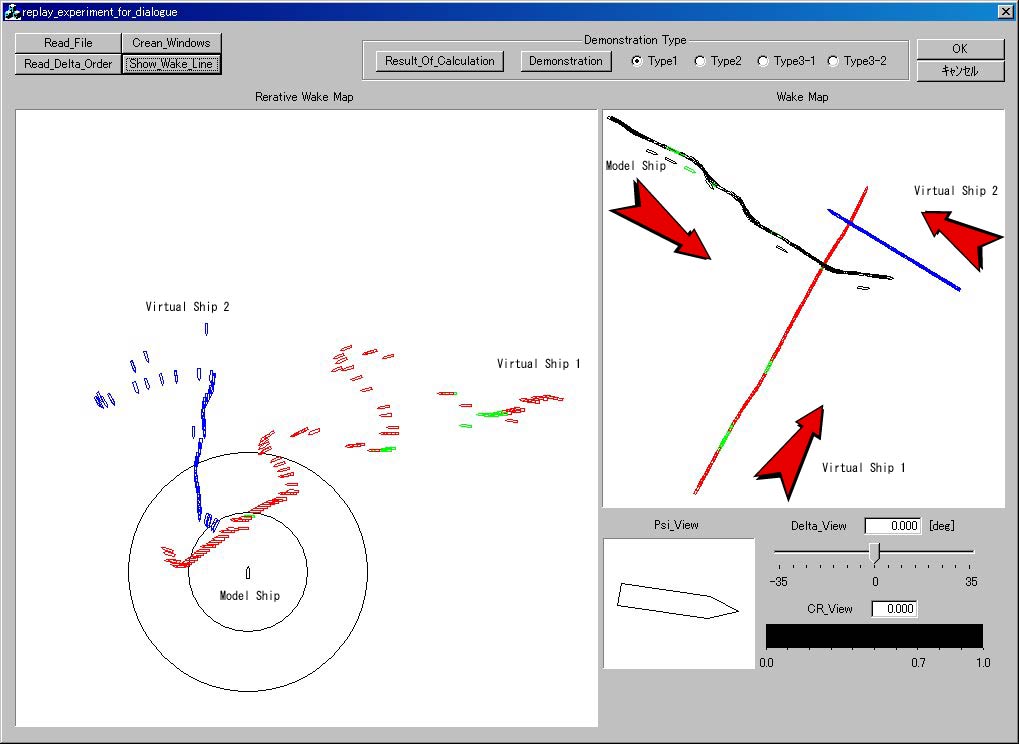
Black: model ship (sailing from upper left to lower right) Red: virtual ship 1 (lower left -> upper right) Bule: virtual ship 2 (middle right -> upper left) Left: relative plot fixed at the model ship Right: abosolute plot
At the point where collision risk is up to the threshold value and ship marks are colored in green, the simulator instructed each ship to avoid the other ship. The model ship first avoid the red ship and when she tried to go back to her original path, the virtual ship 2 approached, so she kept the avoided path and returned after two ships passed safely. Some black ship marks right away from the model ship path were caused by the failure of GPS position detection.
For further information, please contact Prof. Kazuhiko Hasegawa Department of Naval Architecture and Ocean Engineering Graduate School of Engineering Osaka University hase@naoe.eng.osaka-u.ac.jp