◎三角測量法・・・・・三角測量法には2つの送受信可能なセンサーが必要である。センサーは対象の電波等を発しているセンサーまでの距離を測定するものである(図1)。よって、2つあれば対象物が2つの円の交点のどちらかに存在するということが分かる(図2)。
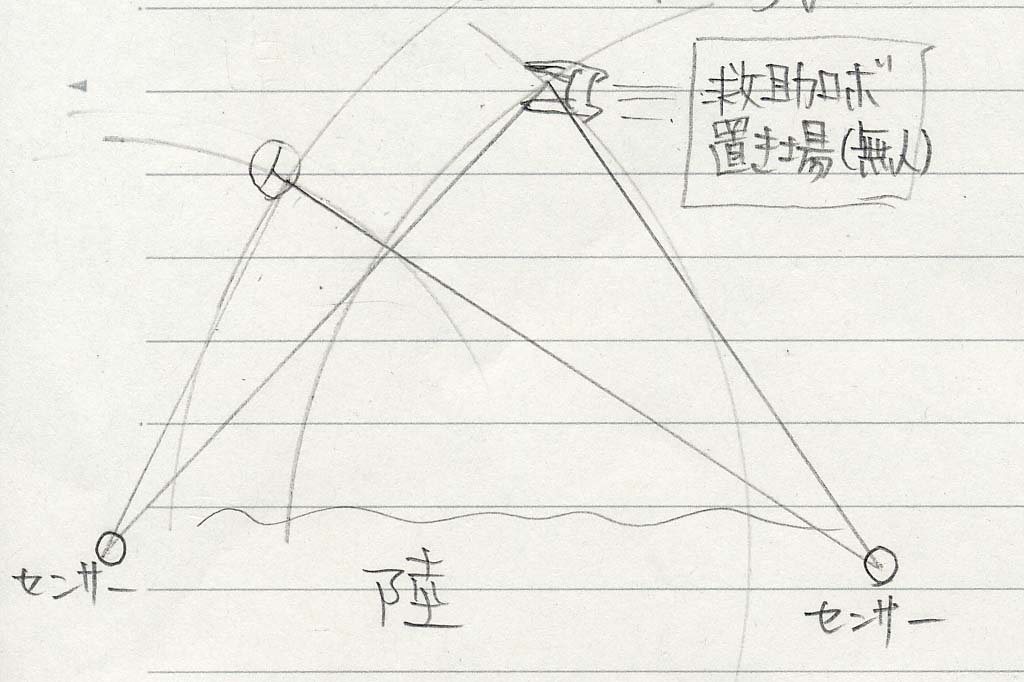
陸上に位置したセンサー(管理者のいる建物のこと)を十分離しておく。
腕輪センサーからの電波をキャッチすればロボ出動、溺れている人の位置を三角測量。
ロボの2つのセンサーはこの段階では他のセンサーと十分離れているため、近似的に1つとみなすことができ、それを用いてロボの位置も三角測量する。
