お掃除ロボット
~D班~
班長:坂口雄紀 (レポート作成)
班員:沢中裕介 (サイズ)
陶山貴志 (サイズ)
小西 亮 (重さ、値段)
(1) 目的
エレベーター付のビル・マンションなどのフロアの床の掃除
(2) 使用時間
人の出入りが最も少ない時間。
具体的には音がうるさいのでオフィスでは夜間、マンションでは昼間。
(3) 必要性
清掃員に対して不信感などいい感情を持っていない人もいるので人の代わりにロボットが掃除をすると言うのは非常に重要である。ビルであれば人件費の削減につながるのはもちろん、昼間清掃員が働いているところではバケツが邪魔になったりしていたのがなくなり快適に過ごせ、夜間、人が皆帰ってから清掃員が働いているところでは掃除ロボの消費電気代よりも明らかに高いであろう照明の電気代削減につながる。一番初めにフロアの図面をインプットしておくだけであとはほとんど難しい操作もいらず楽チンである。
(4) ロボットの移動についての詳細
① あらかじめ下図のようなフロアの形をパソコンに接続して入力しておく。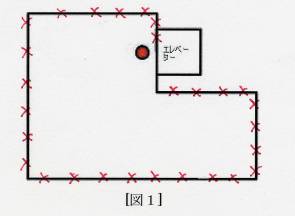
② エレベーターを降りた所(図1,2の赤丸)を動きの視点、終点とする。フロアの形の情報と側部にある測距センサー(赤外線)で20㎝程度先を認識させ、壁との距離を一定に保ちつつ、壁に沿って掃除をしながら一周動く。
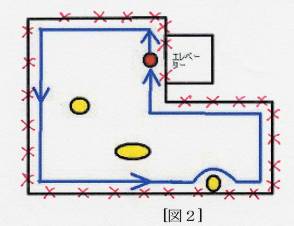
このときに図の右下部分にあるような障害物についての情報を取り込み元々の図(図1)で壁沿いに打ってあった×印を、障害物を避けた軌道上に打ち直し修正する。
障害物は前部についている超音波センサーで50㎝程先まで、前部についている測距センサー(赤外線)で20㎝程度先を認識させ回避するようにする。回避する方法は元々の図(図1)で打たれた、×を中心とした円周上を動きロボットがある距離よりも障害物に近づくと中心となる×を変えることでうまく回避できる(図3)

③ 次にフロアを下図(図4)のようにロボット自身が通った×を図上でチェック(下図では色を変えている)していくことで自身の位置を確認しつつ動き、障害物は前部のセンサーで認識しターンして回避させる。[塗りつぶしのアルゴリズム]
④ まだチェックできていない(図5では赤色のまま)×を通って全ての×がチェックされるまで図4で示した動きと同じように掃除し続けることによって掃除し残している部分(図5のピンク色で示した部分)を全て掃除する。

⑤ 全て終えたと認識すると壁沿いに図1の赤丸の位置に戻り、今まで掃除した向きと直交する向きにも同様に掃除を行う。そして掃除を終えると壁沿いに図1の赤丸の位置に戻る。
⑥ エレベーターを使い、他の階へ行き同じ手順で掃除する。
(5) エレベーターについて
① エレベーターの役割
エレベーターは掃除ロボットの動きの中心となり、ロボットがどの階に今いるのかということを認識させる。
② エレベーターとロボットの通信
エレベーターのコントロールパネル(外部、内部両方)にテレビやエアコンのリモコンのような赤外線センサーを付け、ロボットからはエレベーターの操縦に関するデータを送りその受信に伴ってエレベーターからは今、何階なのかという情報を送信する。
『ロボットの動きはエレベーターに始まりエレベーターに終わる』
(6) 充電について
あらかじめ管理人室をロボットに記憶させておき、ロボットが掃除を終えると管理人室に戻るように設定しておく、そしてそこに設置しておいた充電器に自らつながることで電力が供給される。ビル、マンションに管理人室がない場合はあまり目立たない場所に充電器を置く。ロボットが掃除している間以外は、ロボットはこの充電器の所にいることになる。
(7) 形状、重さ、コストについて
① 形状

② 重さ
約10キロ
バッテリー部分:5キロ
本体部分:5キロ(掃除機:3.5キロ、モーター:1キロ、CPU:0.5キロ)
③ コスト
20万円以内に抑えたい
(8) センサーの詳しい解説
・ 赤外線センサー①
前方約20cmまでの物体について反応できる測距センサーで、障害物を避ける際と壁際を走行する際に使用する。障害物を避ける際にロボットの端が障害物と接触しないようにできるだけ側面の端の方につけてある。又、壁際を通る際に壁と常に平衡を保つためにロボットの側面に2つずつある。
・ 超音波センサー
前方約50cmまでの物体について反応できる測距センサーで、障害物があることを認識し避ける準備を始める。前面に5つついている。
・ 赤外線センサー②
エレベーターとロボットのやり取りに使用する。ロボットの上面についている。エアコンやテレビのリモコンについているセンサーと同じもの。